Download
1 / 28
280 likes | 390 Vues
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs. Motivation. Outline. Wheelchair Rolland as mobile robotic platform. Need for appropriate HRI is essential, especially for a wheelchair-bound person.

E N D
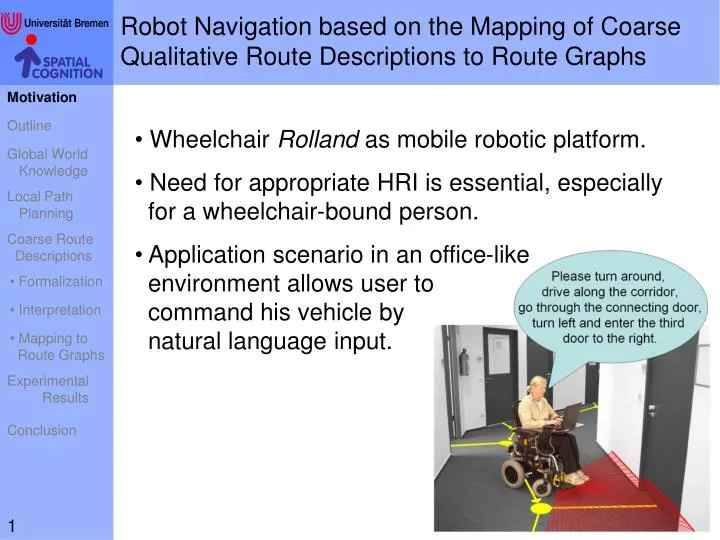
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline • Wheelchair Rolland as mobile robotic platform. • Need for appropriate HRI is essential, especially for a wheelchair-bound person. • Application scenario in an office-like environment allows user to command his vehicle by natural language input. Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 1
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Route Graph Local path planner Formalized Coarse Route Descriptions Natural Language Coarse Route Descriptions Motivation Outline localizes within Global World Knowledge Local Path Planning Coarse Route Descriptions MMC global localizer navigates within • Formalization • Interpretation mapped onto • Mapping to Route Graphs Experimental Results target sequence Conclusion translated to 2
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs • Voronoi-Graph based RouteGraph-layer represents navigable space. • Semantic RouteGraph-layer stores nodes for rooms and regions, • as well as for annotated landmarks. Motivation Outline • Preprocessed bitmap from CAD-blueprint. Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 3
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline • Geometric path planner models obstacle-free paths by means of cubic Bezier curves. • Benefits versus DWA and behavioural approaches: • explicit modelling of necessary haul-off movements • small search space due to 2 free parameters • consideration of heading in goal-pose Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 4
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Introductory example: Outline Global World Knowledge Turn around, drive through the interaction lab, turn left, go to the kitchen and stop at the first junction to the right. Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 5
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Introductory example: Outline Global World Knowledge Turn around,drive through the interaction lab, turn left, go to the kitchen and stop at the first junction to the right. Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 5
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Introductory example: Outline Global World Knowledge Turn around,drive through the interaction lab, turn left, go to the kitchen and stop at the first junction to the right. Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 5
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Introductory example: Outline Global World Knowledge Turn around,drive through the interaction lab, turn left,go to the kitchen and stop at the first junction to the right. Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 5
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchen and stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation <CoarseRouteDesc.> ::= { <CoarseRouteSegmentDesc.> } <CoarseRouteSegmentDesc.> ::= ( <ControllerOnRoutesegment>, <RouterOnRouteSegment>, <ActionAtEndOfRouteSegment> ) <ControllerOnRouteSegment> ::= { ( [Preposition] <Attributed Place> ) | <DistancePredicate> } <RouterOnRouteSegment> ::= { [Preposition] <AttributedPlace> } <ActionAtEndOfRouteSegment> ::= <TurnAction> | „Stop“ <Preposition> ::= „Through“, „OutOf“, „Along“, „NaturalLanguageDirection“, „After“, „Past“, „Between“, „Towards“, ... <AttributedPlace> ::= ( <Place>, <AttributeType>, <AttributeValue> ) <DistancePredicate> ::= ( <NumericalValue>, <LengthUnit> | <TimeUnit> ) <TurnAction> ::= „NaturalLanguageDirection“ Outline Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. 6
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Common spatial relations: example 1 Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Along 2-valued 7
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Common spatial relations: example 3 Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion Front-Left 2-valued 8
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Common spatial relations: further directions Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion … 9
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Global World Knowledge Local Path Planning Coarse Route Descriptions Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 10
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Global World Knowledge Local Path Planning Coarse Route Descriptions Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 10
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Global World Knowledge Local Path Planning Coarse Route Descriptions Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 10
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Global World Knowledge Local Path Planning Coarse Route Descriptions Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 10
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Global World Knowledge Local Path Planning Coarse Route Descriptions Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 10
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline Global World Knowledge Local Path Planning Coarse Route Descriptions Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 10
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Ø Outline Global World Knowledge Local Path Planning Coarse Route Descriptions Turn around, drive through the interaction lab, turn left, go to the kitchenand stop at the first junction to the right. • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 10
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline • For an illustrative video of experimental results visit:http://www.informatik.uni-bremen.de/rolland/videos/Interpretation_of_Coarse_Route_Description_08_06_06.mpg Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 11
Robot Navigation based on the Mapping of Coarse Qualitative Route Descriptions to Route Graphs Motivation Outline • Interpretation of coarse route descriptions facilitated by their mapping onto multi-layered Route Graphs. • Key-concept is the fuzzy interpretation of common spatial relations.To do: • Extension of the set of supported spatial relations. • Benchmarking of the system against available corpora. Global World Knowledge Local Path Planning Coarse Route Descriptions • Formalization • Interpretation • Mapping to Route Graphs Experimental Results Conclusion 12