Download
1 / 1
30 likes | 258 Vues
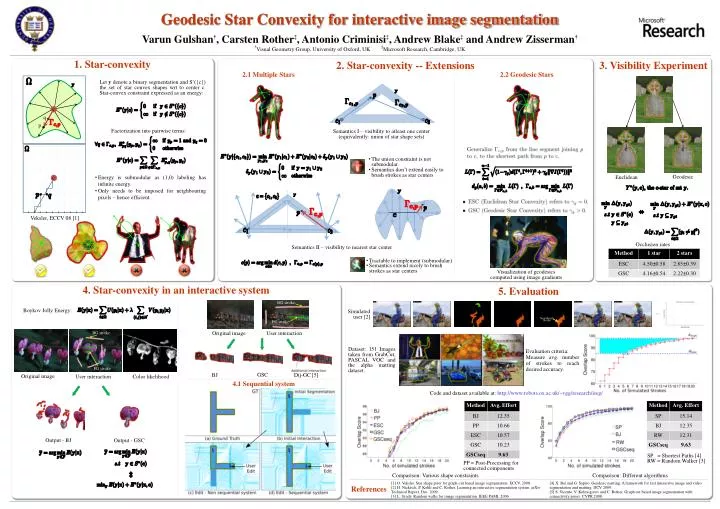
Geodesic Star Convexity for interactive image segmentation. Varun Gulshan † , Carsten Rother ‡ , Antonio Criminisi ‡ , Andrew Blake ‡ and Andrew Zisserman †. † Visual Geometry Group, University of Oxford, UK ‡ Microsoft Research, Cambridge, UK. c. 1. Star-convexity.

E N D
Geodesic Star Convexity for interactive image segmentation VarunGulshan†, Carsten Rother‡, Antonio Criminisi‡, Andrew Blake‡ and Andrew Zisserman† †Visual Geometry Group, University of Oxford, UK ‡Microsoft Research, Cambridge, UK c 1. Star-convexity 2. Star-convexity -- Extensions 3. Visibility Experiment New Brush Stroke 2.1 Multiple Stars 2.2 Geodesic Stars Let y denote a binary segmentation and S*({c}) the set of star convex shapes wrt to center c. Star-convex constraint expressed as an energy: c q Semantics I – visibility to atleast one center (equivalently: union of star shape sets) p Factorization into pairwise terms: • The union constraint is not submodular. • Semantics don’t extend easily to brush strokes as star centers • Energy is submodular as (1,0) labeling has infinite energy. • Only needs to be imposed for neighbouring pixels – hence efficient. Geodesic Euclidean Veksler, ECCV 08 [1] Occlusion rates Semantics II – visibility to nearest star center • Tractable to implement (submodular) • Semantics extend nicely to brush strokes as star centers Visualization of geodesics computed using image gradients 4. Star-convexity in an interactive system 5. Evaluation BG stroke Simulated user [2] Boykov Jolly Energy: .... FG stroke BG stroke Original image User interaction Dataset: 151 Images taken from GrabCut, PASCAL VOC and the alpha matting dataset. Evaluation criteria: Measure avg. number of strokes to reach desired accuracy. FG stroke GSC Dij-GC [5] BJ Original image User interaction Color likelihood 4.1 Sequential system Code and dataset available at: http://www.robots.ox.ac.uk/~vgg/research/iseg/ Output - BJ Output - GSC SP = Shortest Paths [4] RW = Random Walker [3] PP = Post-Processing for connected components Comparison: Various shape constraints Comparison: Different algorithms [1] O. Veksler. Star shape prior for graph-cut based image segmentation. ECCV, 2008 [2] H. Nickisch, P. Kohli and C. Rother. Learning an interactive segmentation system. arXiv Technical Report, Dec. 2009. [3] L. Grady. Random walks for image segmentation. IEEE PAMI, 2006 [4] X. Bai and G. Sapiro. Geodesic matting: A framework for fast interactive image and video segmentation and matting. IJCV 2009 [5] S. Vicente, V. Kolmogorov and C. Rother. Graph cut based image segmentation with connectivity priors. CVPR 2008. References