Download
1 / 5
50 likes | 168 Vues
magnet adjuster box. Numbers needed by QMOV code: LVDT1 x =hoizontal distance from magnet center line to LVDT=Total x +1/2 diam – 132mm LVDT2 x =horizontal distance from magnet center line to LVDT=LVDT total x – LVDT1 x

E N D
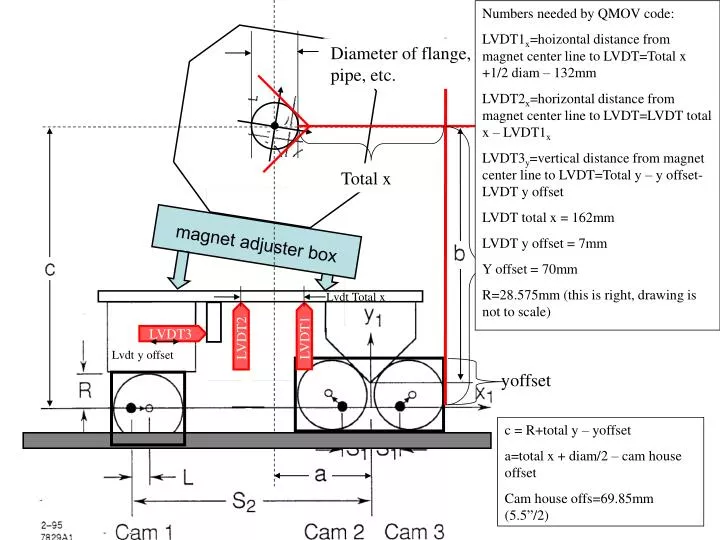
magnet adjuster box Numbers needed by QMOV code: LVDT1x=hoizontal distance from magnet center line to LVDT=Total x +1/2 diam – 132mm LVDT2x=horizontal distance from magnet center line to LVDT=LVDT total x – LVDT1x LVDT3y=vertical distance from magnet center line to LVDT=Total y – y offset-LVDT y offset LVDT total x = 162mm LVDT y offset = 7mm Y offset = 70mm R=28.575mm (this is right, drawing is not to scale) Diameter of flange, beam pipe, etc. Total x Total y Lvdt Total x LVDT3 LVDT1 LVDT2 Lvdt y offset yoffset c = R+total y – yoffset a=total x + diam/2 – cam house offset Cam house offs=69.85mm (5.5”/2)
More numbers needed by QMOV code: For each cam: Rotation offset (cam angle offset to add to perfectly calculated cam angle) = 0 Pot minimum (JEM had -0.2, now 0) Pot maximum (JEM had 10.2, now 10) Pot zero angle (pot “pedestal” what the pot reads when the magnet is at “zero” In epics code: Cam 1: x offset = Bowden’s S2, from JEM 290500 Cam 3: x offset=Bowden’s S1, from JEM 34925 Cam step size=1.5707963e-4 radians (=2*pi/40000steps around) Cam radius=Bowden’s R=31mm Cam lift=Bowden’s L=1.5875mm Magnet bore height=c Bore offsetx=a Bowden’s b = c + cam3 xoffs – sqrt(2)*camradius n.b. JEM is Justin E. May who converted SLC control system position calculation code to C in 2007. J Nelson inherited the project Feb 2008 and finished conversion to EPICS, thereby shortening her lifespan by several years.
QF1 & QF0 Diameter of flange, beam pipe, etc. Total x Total y
SEXT 0,1,4,5,6 Diameter of flange, beam pipe, etc. Total x Total y yoffset
FB2FF Not to scale… had to make BPM very small to show measurement process Diameter of flange, beam pipe, etc. Total x Total y