Download
1 / 33
330 likes | 602 Vues
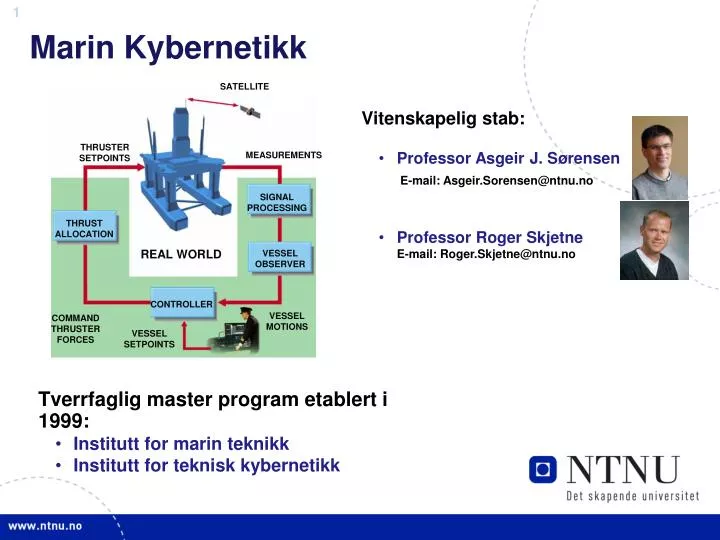
SATELLITE. THRUSTER SETPOINTS. MEASUREMENTS. SIGNAL PROCESSING. THRUST ALLOCATION. REAL WORLD. VESSEL OBSERVER. CONTROLLER. VESSEL MOTIONS. COMMAND THRUSTER FORCES. VESSEL SETPOINTS. Marin Kybernetikk. Vitenskapelig stab:

E N D
SATELLITE THRUSTER SETPOINTS MEASUREMENTS SIGNAL PROCESSING THRUST ALLOCATION REAL WORLD VESSEL OBSERVER CONTROLLER VESSEL MOTIONS COMMAND THRUSTER FORCES VESSEL SETPOINTS Marin Kybernetikk • Vitenskapelig stab: • Professor Asgeir J. Sørensen E-mail: Asgeir.Sorensen@ntnu.no • Professor Roger SkjetneE-mail: Roger.Skjetne@ntnu.no • Tverrfaglig master program etablert i 1999: • Institutt for marin teknikk • Institutt for teknisk kybernetikk
Kybernetikk • Ordet ”kybernetikk” har sin opprinnelse i det greske ordet ”kybernetes”, som betyr ”styrmann/rormann”, dvs. ”den som styrer”. • I ulike fysikkfag så lærer man å matematisk modellere dynamiske system. Kybernetikk er å manipulere dynamiske system for å få dem til å oppføre seg slik DU ønsker. • Eksempler inkluderer alt fra termostatregulering av varmeovner (enkelt) til banestyring av fly (vanskelig) • En av de første reguleringstekniske anvendelsene i moderne tid var autopiloter for skip (”Metal Mike” i 1911), som ble mulig etter at gyroskopet var oppfunnet (gav en pålitelig måling av skipsretningen) System Ønsket oppførsel Pådrag Regulator Faktisk oppførsel
Profil for marin kybernetikk Marin teknikk Marin teknologi Reguleringsteknikk Teknisk kybernetikk IKT IKT
De tre store marine næringene i Norge….: Maritim Offshore olje og gass Fiskeri og Havbruk Disse bidrar til mer enn 70% av Norges eksportinntekter
… og nye marine områder og vekstnæringer Fornybar energi Marine mineraler Marin vitenskap
Metodikk og disipliner • Matematisk modellering av fysiske systemer • Databasert simulering • Design og analyse av reguleringssystemer • Navigasjon og fartøystyring • Instrumentering og sensor-teknologi • Datateknikk og sanntidssystemer
Databasert simulering Simulator Matematiske modeller av skip og utstyr blir implementert og analysert for ulike værsituasjoner, operasjonelle krav og feiltilstander
Navigasjon og fartøystyring • Posisjoneringssystemer: • Autopiloter • Dynamiske posisjonerings-systemer • Thrusterassisterte forankrings-systemer • Hovedfunksjon: • Holde fartøyet, som er utsatt for • bølger • vind • strøm, • på spesifisert posisjon og kursved hjelp av propeller og ror
Maritime elektriske anlegg Diesel-elektriske systemer: • Elektrisk kraftproduksjon og distribusjon. • Elektriske omformere og roterende maskineri • Elektrisk propulsjon • Marin automatisering: • Maskinerisystemer • Ballastsystemer • Lossesystemer • Kompressorstyring • Energifordeling (PMS) • Diagnostikk og tilstands-overvåking
Miljørobust kraftproduksjon: Power and energy management • Optimal produksjon av elektrisk kraft ombord i skip og fartøy. • Hybride kraftanlegg: • Diesel og LNG generatorer • Brenselceller, solceller, bølgekonvertere. • Energilagring vha. batteribanker, svinghjul, osv.
PITCH or RPM CONTROL POWER TORQUE CONTROL POWER VARIABLE TORQUE CONSTANT TORQUE Propulsjon og thrusterstyring • Thrust- og effekt-allokering (distribuering) • Pitch-/turtall-/moment-/effektregulering • Antispin thruster-regulering • Kombinert ror- og propellregulering
Marine operasjoner • Inspeksjon, installasjon og intervensjon • Kranoperasjoner • Undervannsroboter
Arktiske DP operasjoner • DP system med kompensasjon av iskrefter. • Ice Management. • Ubemannede farkoster. • Sikre DP operasjoner i arktis: • Olje- og gassutvinning • Miljø- og overvåknings-operasjoner i nordområdene. Ice
Regulering av fleksible konstruksjoner • Regulering av stigerør i forbindelse med DP-operasjoner • Posisjonering av neddykket last • Regulering av trålsystemer • Regulering av form til havbruksanlegg • Regulering av seismiske kabler • Rørlegging
Regulering av sammenkoblede konstruksjoner • Regulering av storskala sammenkoblede havbruks-anlegg • Havbruk i værutsatte områder • Mobile anlegg • Bølgedemping • Konfigurasjonsstyring Reguleringsfilosofi lik romstrukturer
Ubemannede fartøyer • Bevegelsesstyring av ubemannede fartøyer: • Overflatefartøyer • Undervannsfartøyer • Kan operere i store nettverk for innhenting av informasjon i sann tid over et stort område (eksempel: overvåking av Barentshavet)
Miljøvennlig kraftproduksjon • Vindkraftverk til havs • Bølgekraftverk • Tidevannskraftverk
Theory – Simulation – Experiments – Operations Bridging the gap from theory to practice RV Gunnerus AUR-Lab Unmanned Vehicles Lab Simulator Environment Marine Cybernetics Laboratory Control and instrumentation Hydrodynamics Full-scale and prototype applications Mechanics Cavitation Tunnel Run time infrastructure Experimental techniques & prototyping Machinery systems Ocean Basin Databases, analysis Structural Laboratory Visualisation Towing Tank Marine Technology Petroleum Power systems Automatic Control Navigation
Hydrodynamic Laboratories Ocean basin Towing tank Marine Cybernetics Laboratory Research vessel ”Gunnerus” Other specialized experimental facilities (e.g. for sloshing tests)
NTNU Research Vessel Gunnerus NTNU's research vessel, R/V Gunnerus, was put into operation in spring 2006. The ship is fitted with a dynamic positioning system and a HiPap 500 unit, optimal for ROV operations and the positioning of any deployed equipment. The vessel is arranged with wet lab, dry lab and a computer lab in addition to a large aft deck. Accommodation comprise three double berth scientific personnel cabins and three single berth crew cabins. The large mess hall functions as a lecture room for 25 people. ROV MINERVA
NTNU strengthen ocean space research and education by integrating technology and science Applied Underwater Robotics Laboratory (AUR-Lab) officially opened 23 August 2011 by Mr. Trond Giske, Minister of Trade and Industry
Applied Underwater Robotics Laboratory AUR-Lab • Scientific focus areas: • Development of technology for guidance, navigation and control of underwater vehicles (ROVs and AUVs) • Underwater acousticcommunication • Environmental monitoring and mapping at sea surface, water column, and sea bed • Operations under ice in the arctic • Study of any object of interest (bio-geo-chemical objects) • Evaluation of seabed properties and habitat • Complex deepwater underwater operations including inspection and intervention • Deep water archeology Photo: NTNU AUR-Lab Photo: NTNU AUR-Lab RV Gunnerus
ROV Minerva • Observation class • ~400 kg • 3CCD camera • 3 ”regular” ROV-camera • 5-function manipulator • 1-functions manipulator • Scanning sonar • Altimeter • ~600 meter cabel on winch (fiber) • HiPAP and DVL for positioning • Control container
AUV REMUS 100 • Marine Sonics 900 kHz Side Scan sonar • Teledyne RDI 1.2 MHz up/down DVL/ADCP • Wet Labs ECO Triplet puck • Aanderra Dissolved Oxygen Optode • Neil Brown CT sensor • LBL navigation system • Imagenex Delta T multibeamechosounder Navigation: Inertial Navigation GPS/HiPAP(tracking, aiding) Communications: Acoustic modem, Wi-Fi, Iridium REMUS support from Horten REMUS training in Horten 24
Dynamic Positioning System for ROV Minerva Goal: Make control system with user interface for dynamic positioning (DP) and tracking for use in real ROV missions. Process: A team of MSc students, PhD candidates and Post Docs has been working on this since 2010 with monthly cruises. The control system is tested on a simulation model before deployment on ROV Minerva. The control system is deployed and tested on the ROV Minerva during monthly cruises with R/V Gunnerus in the development stages.
DP Control Platform • Compact RIO (cRIO) from National Instruments is the controller platform • Measurement signals are fed to the cRIO via serial ports. • The control software is deployed on the cRIO but a host PC provides the user interface.
Integrated operations by RV Gunnerus, AUV and ROVDecember 2011, Frøya, Seabed and Kelp Mapping, AUR-Lab
Aktuelle Fordypningsemner • Marin kybernetikk: • Avansert modellbasert design og testing av marine reguleringssystemer (3,75 SP) • Avanserte reguleringsmetoder for marine systemer(3,75 SP) • Marine Mekatronikk (3,75 SP) • Andre relevante emner ved instituttet: • Dynamisk analyse av marine konstruksjoner (3,75 SP), • Konstruksjonsanalyse VK (3,75 SP), • Eksperimentelle metoder i marin hydrodynamikk (3,75 SP), • Numeriske metoder i marin hydrodynamikk (3,75 SP), • Hydroelastisitet (3,75 SP), • Is-1 (3,75 SP), • Is-2 (3,75 SP), • Andre relevante emner ved ITK: • Robotteknikk (3,75 SP), • Ulineær bevegelsesstyring (3,75 SP), • Kalman filtrering og navigasjon (3,75 SP).
Fordypningsemne: Avansert modellbasert design og testing av marine reguleringssystemer Ansvarlig: Professor Asgeir J. Sørensen Litteratur: Marine Control Systems: Propulsion and Motion Control of Ships, Underwater Vehicles and Ocean Structures. Report UK-10-76, 2010, Department of Marine Technology. DNV. Rules for classification of ships. Selected papers on marine control applications. Mål: Temaet vil gi innsikt og kunnskap til å analysere, utvikle og teste avanserte marine reguleringssystemer. Innhold: Emnet vil gi en fordypning i matematisk modellering og design av hybride og modellbaserte reguleringssystemer for propulsjon og bevegelsesstyring av skip, undervannsfarkoster og marine konstruksjoner. Det vil bli lagt vekt på marintekniske anvendelser der prosessforståelse og fysisk innsikt er spesielt viktig i design og testing av reguleringssystemer. Dette inkluderer fleksible systemer beskrevet av partielle differensial ligninger, hurtiggående fartøyer og avanserte marine og undervannsoperasjoner under krevende og skiftende værforhold og på dypt vann, samt optimaliseringsmetoder for thrust allokering. Eksempler er regulering av stigerør og rørledninger, vibrasjonsdemping, bevegelsesdemping av luftputekatamaraner, undervannsrobotikk og dynamisk posisjonering av skip og rigger i ekstrem sjø og isbelagte farvann. Testing av marine reguleringssystemer ved hjelp ”Failure mode and effect analysis – FMEA” og simulatorteknologi omtalt som ”Hardware-In-the-Loop (HIL) testing” vil også bli behandlet.
Fordypningsemne: Avanserte reguleringsmetoder for marine systemer • Ansvarlig: Professor Roger Skjetne • Litteratur: Bøker og/ellerartikleravhengigavvalgtkybernetiskfagområde (spesifiseres). • Mål: • De tilsiktede læringsmål for studenten er å kunne designe et avansert reguleringssystem innenfor et spesifisert kybernetisk fagområde, analysere systemets egenskaper rundt stabilitet og ytelse, kunne anvende dette for en valgt maritim applikasjon i et designprosjekt, og rapportere dette arbeidet skriftlig. • Innhold: • Studenten velger en ytterligere fordypning innen et av følgende områder: • Adaptive reguleringsdesign av ulineære systemer (adaptiv backstepping, gradientsøkmetoder, osv.), • Robuste ulineære reguleringsmetoder (ulike backstepping design, ISS design metoder, sliding-mode design, passiveringsdesign, og ulineær PID og integralregulering), • Manøvreringsteori og banefølgingsteori for styring av marine farkoster langs baner (baneparametrisering og banegenerering, guidance teorier, og relevante regulatoralgoritmer), • Styring av formasjoner av farkoster (formasjonskonfigurasjoner, reguleringsstrategier, guidance strategier, antikollisjon, osv.), og • Feildiagnostikk og feiltolerant reguleringsmetoder (feildeteksjon, feilisolasjon, og rekonfigurasjon av regulatorsløyfer for å håndtere feilsituasjoner i utstyr og prosesser). • Læring av teori utføres ved bruk av felles forelesninger, kollokvier, og/eller veiledninger avhengig av praktiske forhold (antall studenter innen et gitt område, osv.) Ilag med ansvarlig fagperson velger hver student en applikasjon å anvende reguleringsmetoden på. Dette skal resultere i et reguleringsdesign for applikasjonen, analyse av dets egenskaper, og simuleringsresultat. Arbeidet skal rapporteres skriftlig og vil telle 50% av karakteren i emnet. Resterende del av karakteren baseres på en muntlig prøve.
Fordypningsemne: TMR 21 Marin mekatronikk Faglærere: Førsteamanuensis Eilif Pedersen Uketimer: Høst: 2F + 3Ø + 2S = 3.75 SP Tid: TBD Karakterer: Modulen inngår i fordypningsemne TMR4535 (50%) Obl.aktiviter: Ja Læringsmål: Modulen har som mål å gi studenter som ønsker å arbeide med analyse av dynamikk i mekatroniske systemer en introduksjon til og trening i bruk av analyttiske og databaserte løsningsmetoder for formulering av modeller og analyse av slike systemers dynamikk. Anbefalte forkunnskaper: TMR4275 Modellering, simulering og analyse av dynamiske systemer TTK4105 Reguleringsteknikk vil være en fordel Faglig innhold: Gjennomgang av partikkel og partikkelsystemers kinematikk og dynamikk. Stive legemers dynamikk i generell bevegelse i 3D. Introduksjon til Hamilton’s prinsipp og Lagrange’s metode for formulering av bevegelsesligninger for mekaniske systemer. Aktuatorer i mekatronsike systemer, modellering og styring. Modellering av sammensatte systemer og løsning av bevegelsesligninger ved hjelp av datamaskin. Anvendelser fra maskindynamikk, robotteknikk og generell mekatronikk.