Download
1 / 1
20 likes | 187 Vues
EECS373 - Design of Microprocessor-Based System Autonomous Obstacle Avoidance Vehicle. Autonomous Obstacle Avoidance Vehicle.

E N D
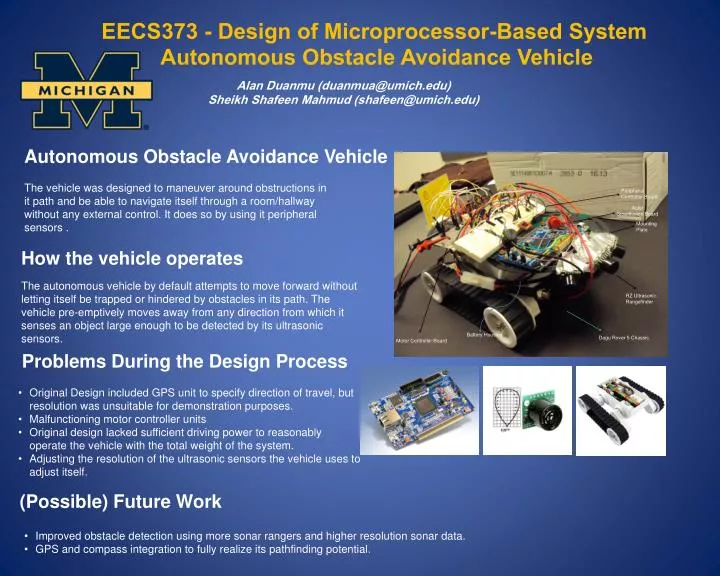
EECS373 - Design of Microprocessor-Based System Autonomous Obstacle Avoidance Vehicle Autonomous Obstacle Avoidance Vehicle The vehicle was designed to maneuver around obstructions in it path and be able to navigate itself through a room/hallway without any external control. It does so by using it peripheral sensors . Peripheral Controller Board Actel Smartfusion Board Mounting Plate How the vehicle operates The autonomous vehicle by default attempts to move forward without letting itself be trapped or hindered by obstacles in its path. The vehicle pre-emptively moves away from any direction from which it senses an object large enough to be detected by its ultrasonic sensors. RZ Ultrasonic Rangefinder Alan Duanmu (duanmua@umich.edu)Sheikh Shafeen Mahmud (shafeen@umich.edu) Battery Housing Dagu Rover 5 Chassis Motor Controller Board Problems During the Design Process • Original Design included GPS unit to specify direction of travel, but resolution was unsuitable for demonstration purposes. • Malfunctioning motor controller units • Original design lacked sufficient driving power to reasonably operate the vehicle with the total weight of the system. • Adjusting the resolution of the ultrasonic sensors the vehicle uses to adjust itself. (Possible) Future Work • Improved obstacle detection using more sonar rangers and higher resolution sonar data. • GPS and compass integration to fully realize its pathfinding potential.