Download
1 / 21
210 likes | 302 Vues
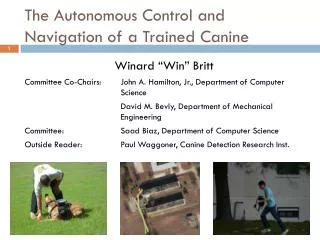
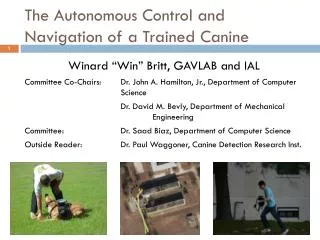
Automated Modeling of the Guidance of a Trained Canine. Winard “Win” Britt Committee Chair: John A. Hamilton, Jr., Department of Computer Science Committee: David M. Bevly, Department of Mechanical Engineering Saad Biaz, Department of Computer Science. The K-9 Team.

E N D
Automated Modeling of the Guidance of a Trained Canine Winard “Win” Britt Committee Chair: John A. Hamilton, Jr., Department of Computer Science Committee: David M. Bevly, Department of Mechanical Engineering Saad Biaz, Department of Computer Science
The K-9 Team • David M. Bevly, Associate Professor ME • Winard Britt, PhD Candidate CS • Jeffrey Miller, PhD Candidate ME • Stephan Henning, UG EE • Conrad Bass, UG ME • The Canine Detection Research Institute (part of the AU Vet School) Staff
Acknowledgement • This project is financially supported by the Office of Naval Research YIP award N00014-06-1-0518.
Outline • Motivation • Goals • Architecture • Methodology • Validation • Concluding Remarks
Motivation • K-9s can detect narcotics and explosives via scent to a high degree of accuracy. • However, most K-9 teams require one or more support staff per K-9 deployed in the field. • If K-9s could be made to be largely autonomous, they could be used without direct human supervision.
Why not use robots? • Comparatively, dogs have… • better obstacle avoidance • greater mobility • more sophisticated “sensors” like smell, sight, etc.
Problem Statement Given a trained canine (K-9) which responds to audio and vibration commands, how can the K-9 be autonomously directed to given waypoints without human intervention?
Goals • A contribution to K-9 guidance in the form of a “remote control" K-9 unit with an advanced sensor pack. • A contribution to K-9 guidance in the form of being able to classify K-9 behavior as “on course" or “off course.“ • A contribution to K-9 guidance in the form of being able to model more sophisticated K-9 commands such as “left" and “right" and “stop" to guide the K-9 to a goal.
Goals (2) • General control algorithms for the guidance of autonomous K-9 units. • A contribution to the area of machine learning in the form of a comparison of methods for the K-9 control problem. • A contribution to the area of evolutionary computation in the form of a comparison between two evolutionary algorithms for ML optimization.
Related Work • K-9 units have been used (not autonomously) as a means of detection of explosives and narcotics with tremendous success. • Machine Learning has been successfully applied to a wide variety of classification and modeling problems, including a number of efforts relating to vehicles and robots. • Evolutionary Algorithms have been successfully applied to the optimization of Machine Learners for a number of difficult problems.
Unique Challenges • Dogs do not exhibit deterministic behavior (like vehicles and robots) • The concept of a dog “behavior” is complex. • Sensor data from a command pack is a subset of the data a human trainer has when guiding a dog. • Building a new embedded system and interfacing it with sensors is time-consuming. • Resource constraints on the embedded system limit algorithm choices.
System Architectures • Three phases consist of: • Training Phase I: An initial effort performed by the GAVLAB prior to the beginning of this project. The goal was to interface some basic sensors and see how well they worked on a dog. • Training Phase II: A full sensor suite along with an interfaced command pack. The goal was to make the data collection considerably more precise. • Autonomous K-9 Phase: Once models have been developed, use them to guide the K-9 without human intervention.
Phase I (Legacy Training) GPS Satellites Rabbit: Collects and parses the sensor data from the various sensors, then sends to the Xbee modem. Sensor Pack Rabbit Processor GPS Receiver IMU Xbee Radio Modem Binary Tone Generator GPS: Provides latitude, longitude, velocity, and heading. IMU: Provides acceleration and rate of turn. Radio: Transmits the parsed sensor information over the wireless link. Handset: transmits the current command wirelessly to the tone generator. K-9: Responds to the tone to follow along the intended path. Data Sink Handset for Binary Tone Generator Operator: Records the tone changes manually. Trainer: Issues the tone commands to guide the K-9 through his handset.
Results of Training Phase I • Verified K-9 Training and Responses to tones. • Verified that reasonable sensor data could be obtained from GPS on-board the K-9. • Created a successful (85% accurate) model of K-9 behavior using General Regression Neural Networks and Evolutionary Computation [Britt, Bevly 2008]
Phase II (Training - A “Remote Controlled” K-9) GPS Satellites Command Module: Issues tone commands to the K-9 and outputs those commands to the Rabbit. Rabbit: Collects and parses the sensor data from the various sensors and command module, then sends to the Xbee modem. Sensor Pack Rabbit Processor GPS Receiver XSens Xbee Radio Modem Command Module GPS: Provides latitude, longitude, velocity, and heading. XSens: Provides acceleration, rate of turn, and mag. data. Radio: Transmits the parsed sensor information and the currently active commands over the wireless link. Handset: transmits the current command wirelessly to the tone generator. K-9: Responds to the tone to follow along the intended path. Data Sink Handset for Command Module Operator: Starts/Stops recording data for various experimental trials. Trainer: Issues the tone commands to guide the K-9 through his handset.
At the end of Training Phase II • Sufficient data from a new, precise command pack to effectively build models based on General Regression Neural Networks, Radial Basis Function Networks, and Support Vector Machines. • Sufficient data to perform sensor data aggregation (GAVLAB)
GPS Satellites Sensor Pack Phase III (Autonomous K-9) Rabbit Processor Rabbit: Collects and parses the sensor data from the various sensors, filters that data, uses the model to issue a new command to the command module, then sends to the Xbee modem. Model: Algorithm to interpret filtered sensor data and issue new commands Filter: Algorithm to aggregate GPS/IMU data for accuracy. Command Module: Receives commands from the rabbit and issues them to the K-9. GPS Receiver XSens Xbee Radio Modem GPS: Provides latitude, longitude, velocity, and heading. XSens: Provides acceleration, rate of turn, and mag. data. Command Module Radio: Transmits the parsed sensor information and the currently active commands over the wireless link. Data Sink Operator: Inputs destination coordinates. Starts/Stops recording data. K-9: Responds to the tone to follow along the intended path.
At the end of the Autonomous K-9 Phase • On-board software should be able to receive a destination GPS waypoint and the dog should be commanded successfully to that waypoint. • Many trials will be performed to validate the effectiveness of the approach in terms of ability to get the K-9 to the specified waypoints. • Different paths and path setups will be applied in order to validate the control algorithm.
Key Contributions so Far • Trained K-9s to effectively respond to tones. • Working Phase II System (A “Remote Control” K-9) in trials now. • The ability to model K-9 behaviors as on or off course [Britt, Bevly, Dozier 2008]. • New modeling algorithms have been developed and are awaiting sufficient Training Phase II data.
Conclusion • Automating a K-9 is a complex, cross-disciplinary task that requires a number of components. • All of the basic components have been either built or proven capable of being built. • The Autonomous K-9 project stands to improve the utility and flexibility of using K-9s in law enforcement and military applications.
Questions • Questions? • Comments? Nice comments are nice too.