Download
1 / 27
270 likes | 429 Vues
Modelling Slip- and Creep-mode Shift Speed Characteristics of a Pushbelt Type CVT. Bram Bonsen, Tim Klaassen, Koen van de Meerakker, Bram Veenhuizen, Maarten Steinbuch. Project goal. Optimize a pushbelt-type CVT to maximize efficiency by changing the actuation system. Slip & Efficiency.

E N D
Modelling Slip- and Creep-mode Shift Speed Characteristics of a Pushbelt Type CVT Bram Bonsen, Tim Klaassen, Koen van de Meerakker, Bram Veenhuizen, Maarten Steinbuch
Project goal • Optimize a pushbelt-type CVT to maximize efficiency by changing the actuation system
CVT actuation changes • Reduction of actuation losses by: • Lowering clamping force • Using alternative actuation methods
Modeling variator • What is the expected • Efficiency • Needed actuation forces • Transient response
Existing models • Either • Too complex • Did not describe the effects of slip and its influence on the actuation system
Transient models • Ide • Shafai • Simplified
Transient models • Ide • Good description of transient behavior when not in slip-mode • Shafai • Good description of transient behavior when in slip-mode
Combination • Ide when in creep-mode shifting • Shafai when in slip-mode shifting
Friction / Slip • Friction force opposite to slip direction • Tangential slip vs Radial slip Torque transmission vs Shifting
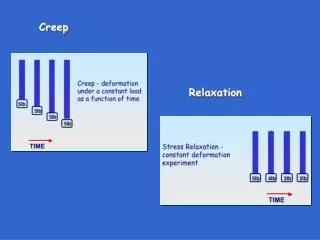
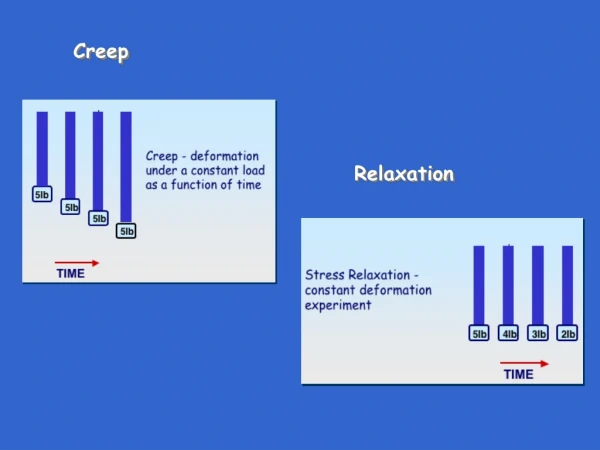
Friction model • Coulomb friction model: • Microslip = stiction = creepmode • Macroslip = sliding = slipmode
Microslip shifting mechanism • Shifting and torque transmission not related • Belt only partially slipping • Shifting by elastic deformation of the pulleys • Shifting behavior dependent on primary speed
Macroslip shifting mechanism • Slip in both tangential and radial direction • Shift speed primary speed independent • Shift speed limited by actuation system only
Model • Sliding when force >= friction, • Stick when force < friction
Friction calculation • Friction • Direction
Identification • Minimize output error • Number of Parameters limited to 4
Identification results • Very high pulley mass found • Oil in pipes • Simplified Ide model used to reduce number of parameters
Conclusions • Combined model is more in agreement with the measurements • Possibility to investigate more efficient actuation system based on slip
Recommendations • Identification on different transmissions • Slip while shifting is incorporated in this model. This can be used to make the actuation more efficient. • Optimize the transmission based on the given parameters. (stiffness, length and thickness of pipes, place of actuators etc)