Ch09 _2 Approximation algorithm
150 likes | 165 Vues
Learn about the Polynomial-Time Approximation Schemes (PTAS) for finding the maximum independent set problem on planar graphs. Explore the algorithm, properties, and terminology associated with this NP-hard problem. Find out how to guarantee a given error bound for the approximation solution.

Ch09 _2 Approximation algorithm
E N D
Presentation Transcript
NP-Complete Problem • Enumeration • Branch an Bound • Greedy • Approximation • PTAS • K-Approximation • No Approximation
Polynomial-Time Approximation Schemes • A problem L has a polynomial-time approximation scheme (PTAS) if it has a polynomial-time (1+ε)-approximation algorithm, for any fixed ε >0 (this value can appear in the running time). • For example, there is a PTAS for finding the maximum independent set problem on planar graphs.
Independent set • An independent set is a set of vertices in a graph, no two of which are adjacent. • An maximal independent set is anindependent set that is not a subset of any other independent set. maximum independent sets
Finding the maximum independent set problem • The input is an undirected graph, and the output is a maximum independent set in the graph. • It is a NP-hard problem and it is also hard to approximate, and the decision problem is NP-Complete. • Fortunately,there is a PTAS for finding the maximum independent set problem on planar graphs.
Planar graph • A planar graph is a graph that can be embedded in the plane, i.e., it can be drawn on the plane in such a way that its edges intersect only at their endpoints. 1 5 2 4 3 (a) A Planar Graph. (b) A Graph Which Is Not Planar. Figure 9-41 Planar Graphs.
Terminology • The unbounded faces are called exterior faces and all other faces are called interior faces. exterior face interior face
Terminology • We can use faces to mark the level of each node. 1 1 2 2 3 2 2 3 3 1 2 2 2 2 1 2 1
Terminology • A graph is k-outerplanar if it has no nodes with level greater than k. Figure 9-43 An Example of 2-Outerplanar Graph.
Property • Given an arbitrary planar graph G, we can decompose it into a set of k-outerplanar graphs. • For a k-outerplanar graph, an optimal solution for the maximum independent set problem can be found in O(8kn) time through the dynamic programming approach where n is the number of vertices.
Example A Planar Graph which Has 9 Levels. The Graph Obtained by Removing Nodes in levels 3, 6 and 9.
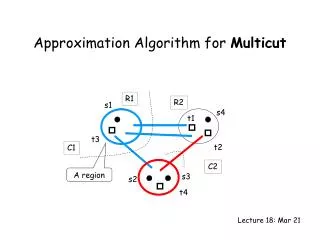
An Approximation Algorithm • Step 1. For all i = 0, 1, ..., k, do • (1.1) Let Gi be the graph obtained by deleting all nodes with levels congruent to i (mod k + 1). The remaining subgraphs are all k-outerplanar graphs. • (1.2) For each k-outerplanar graph, find its maximum independent set. Let Si denote the union of these solutions. • Step 2. Among S0, S1, ... , Sk, choose the Sj with the maximum size and let it be our approximation solution SAPX. • The time-complexity of our approximation algorithm is obviously O(8kkn).
PTAS • Thus there is at least one r, such that at most of vertices in SOPT are at a level which is congruent to r (mod k + 1). • This means that the solution Srobtained by deleting the nodes in class r from SOPT will have at least |SOPT|(1 -) = |SOPT| nodes.
PTAS • Therefore, |Sr| |SOPT| . • According to our algorithm, • |SAPX| |Sr| |SOPT| or • e = • Thus if we set k =-1,then the above formula becomes • e =E.
Conclusion • This shows that for every given error bound E, we have a corresponding k to guarantee that the approximation solution differs from the optimum one within this error ratio.