Download
1 / 1
10 likes | 106 Vues
UNH Wireless HUMMER. What is the UNH Wireless Hummer?. Sensors. Team: Justin Audley , Blake Brown, Christopher Dean, Andrew Russell, Andrew Saunders Advisor : Dr. Richard A. Messner Sponsors : Dr. Richard A. Messner , UNH ECE Department.

E N D
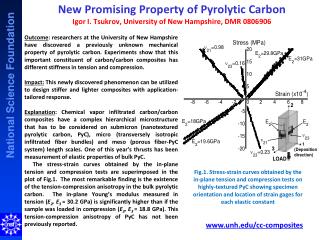
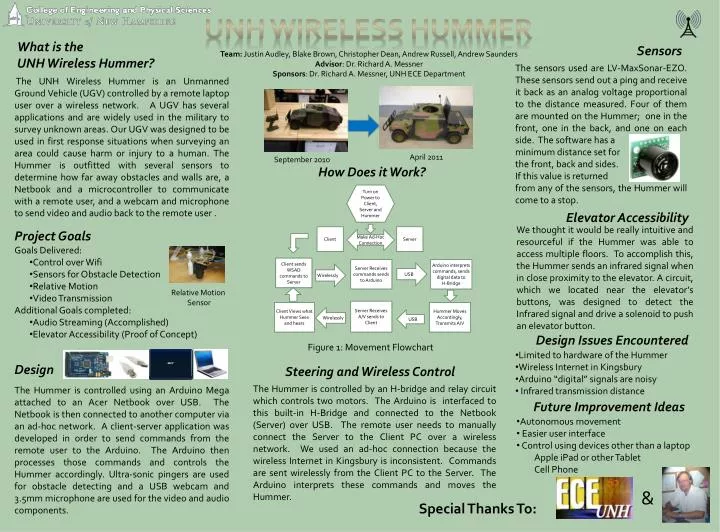
UNH Wireless HUMMER What is the UNH Wireless Hummer? Sensors Team: Justin Audley, Blake Brown, Christopher Dean, Andrew Russell, Andrew Saunders Advisor: Dr. Richard A. Messner Sponsors: Dr. Richard A. Messner, UNH ECE Department The sensors used are LV-MaxSonar-EZO. These sensors send out a ping and receive it back as an analog voltage proportional to the distance measured. Four of them are mounted on the Hummer; one in the front, one in the back, and one on each side. The software has a minimum distance set for the front, back and sides. If this value is returned from any of the sensors, the Hummer will come to a stop. The UNH Wireless Hummer is an Unmanned Ground Vehicle (UGV) controlled by a remote laptop user over a wireless network. A UGV has several applications and are widely used in the military to survey unknown areas. Our UGV was designed to be used in first response situations when surveying an area could cause harm or injury to a human. The Hummer is outfitted with several sensors to determine how far away obstacles and walls are, a Netbook and a microcontroller to communicate with a remote user, and a webcam and microphone to send video and audio back to the remote user . April 2011 September 2010 How Does it Work? Turn on Power to Client, Server and Hummer Elevator Accessibility We thought it would be really intuitive and resourceful if the Hummer was able to access multiple floors. To accomplish this, the Hummer sends an infrared signal when in close proximity to the elevator. A circuit, which we located near the elevator’s buttons, was designed to detect the Infrared signal and drive a solenoid to push an elevator button. • Project Goals • Goals Delivered: • Control over Wifi • Sensors for Obstacle Detection • Relative Motion • Video Transmission • Additional Goals completed: • Audio Streaming (Accomplished) • Elevator Accessibility (Proof of Concept) Client Server Make Ad-Hoc Connection Client sends WSAD commands to Server Server Receives commands sends to Arduino Arduino interprets commands, sends digital data to H-Bridge USB Wirelessly Relative Motion Sensor Server Receives A/V sends to Client Client Views what Hummer Sees and hears Hummer Moves Accordingly, Transmits A/V Wirelessly USB Design Issues Encountered Figure 1: Movement Flowchart • Limited to hardware of the Hummer • Wireless Internet in Kingsbury • Arduino “digital” signals are noisy • Infrared transmission distance Design Steering and Wireless Control The Hummer is controlled by an H-bridge and relay circuit which controls two motors. The Arduino is interfaced to this built-in H-Bridge and connected to the Netbook (Server) over USB. The remote user needs to manually connect the Server to the Client PC over a wireless network. We used an ad-hoc connection because the wireless Internet in Kingsbury is inconsistent. Commands are sent wirelessly from the Client PC to the Server. The Arduino interprets these commands and moves the Hummer. The Hummer is controlled using an Arduino Mega attached to an Acer Netbook over USB. The Netbook is then connected to another computer via an ad-hoc network. A client-server application was developed in order to send commands from the remote user to the Arduino. The Arduino then processes those commands and controls the Hummer accordingly. Ultra-sonic pingers are used for obstacle detecting and a USB webcam and 3.5mm microphone are used for the video and audio components. Future Improvement Ideas • Autonomous movement • Easier user interface • Control using devices other than a laptop • Apple iPad or other Tablet • Cell Phone & Special Thanks To: