Download
1 / 18
180 likes | 221 Vues
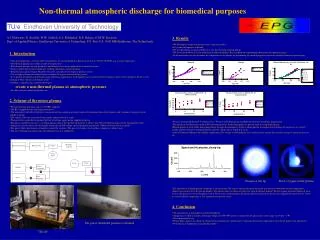
1 Eindhoven University of Technology, PO Box 513, NL-5600 MB Eindhoven, The Netherlands, 2 Queen Mary, University of London, Mile End Road, London E1 4NS, UK 3 Philips Research Laboratories, High Tech Campus 4, NL-5656AE Eindhoven, The Netherlands. *e-mail: c.l.v.oosten@tue.nl.

E N D
1Eindhoven University of Technology, PO Box 513, NL-5600 MB Eindhoven, The Netherlands, 2Queen Mary, University of London, Mile End Road, London E1 4NS, UK 3Philips Research Laboratories, High Tech Campus 4, NL-5656AE Eindhoven, The Netherlands. *e-mail: c.l.v.oosten@tue.nl.
Advantages and Challenges • Polymers are attractive for micromechanical systems (MEMS) and lab-on-a-chip systems • Allow for lightweight • b) Flexible and disposable devices • c) Cheap and easy to process. • Challenges in the large scale fabrication of micro actuators on a single substrate • Suitability for micro structuring • Multilayer structure of conjugated polymer microactuators complicates the production • actuators are often electrically addressed, requiring inorganic (metal) electrodes, thus • leading to extreme manufacturing conditions; that is, processing occurs at high • temperatures and/or in acidic or basic environments
Shape Change in Liquid Crystalline Polymers Liquid-crystalline polymers are polymers with high degree of order in the monomeric liquid-crystalline subunits Order in liquid crystalline polymer is normally induced during processing. In liquid-crystalline polymers actuators the shape deformation is achieved by a change in this molecular order. Average orientation of the monomeric units dictates the direction of the shape deformation The most common way of obtaining light driven order change liquid crystalline poplymer is by incorporating the azobenzene unit. Trans azobenzene induce the order in the mesogen Cis azobezne disrupt the order of the mesogenic host
Ikeda and coworkers..... Angew. Chem. Int. Ed. 2008, 47, 4986 –4988 NATURE|VOL 425 | 11 SEPTEMBER 2003
Content of the paper…. A new approach to produce micro actuators though inkjet printing followed by photo polymerization Azo benzenes as an additive to optically address the actuators A simple actuator design is adopted mimicking the cilia in nature
Experimental….. A3MA has an absorption peak of 358nm for the trans state, whereas the trans-absorption band of DR1A is at 490 nm. The optimal dye concentration depends on the molar absorption of the dye and the thickness of the film. An azobenzene concentration of 4 wt% for the A3MA dye and 1 wt% for the DR1A dye was chosen.
Monomers C6M, C6BP and C6BPN were mixed in the weight ratio 2:3:1 The concentration of the azobenzene monomers The extinction length d for non-polarized light at the peak absorption wavelengths of the dye was measured in DR1A and A3MA polymer film samples with planar uniaxial alignment and with known concentration and thickness. To ensure a deep penetration of light into the 10-m-thick actuators, the dye concentrations in the final monomeric mixtures were then set to 5:6 μM (DR1A polymer) and 5.75 μM (A3MA polymer).
The host matrix of the actuator is based on a combination of liquid crystals functionalized with acrylate and methacrylate Photopolymerized using radical initiator preserving the molecular alignment from monomers in to polymer One step Manufacture and optimized alignment in the monomer phase In many actuators the bending is achieved by creating a bi-layer structure of materials with a different degree of responsiveness The self organizing and anisotropic properties of liquid crystal were exploited to create an internal gradient in a single layer uniaxial planar alignment (a) twisted nematic(TN) alignment (b) splayed alignment (c)
Under unforced conditions, the mix of liquid-crystal monomers will align perpendicular to the air interface, minimizing its surface free energy. To overcome this, in-plane alignment at the air interface is obtained by adding a small amount of surfactant PS16 to the reactive monomeric mix. The directionality of the alignment at the air interface is introduced by giving the molecular alignment at the bottom surface a slight pre-tilt from the surface normal. A molecular anchoring of 80 degree with respect to the substrate is obtained by the unidirectional rubbing of a homeotropic-aligning polyimide layer, which reproduces the desired molecular alignment.
Manufacturing of miniature actuators…… • Release layer 1μM PVA • Spin-coating, curing and buffing of the polyimide alignment layer • Inkjet deposition of the monomer mixes containing DR1A (3) and A3MA and curing • Dissolving the PVA release layer.
Cilia in microorganism paramecia An individual cilium makes a flapping, asymmetric motion, with a backward stroke different from the forward stroke, causing an effective flow in the surrounding fluid. Using two dyes, varying the composition of the actuator in the plane, is proposed
Responses of 7mm long, 4mm wide and 10 μm thick actuator with varying molecular alignment configurations on 100mW/cm2 UV illumination from the top. Splayed films bend up or down depending on the molecular orientation. Images were taken after 0, 0.04, 0.20 or 0.50 seconds of exposure and after 40 seconds of recovery in dark conditions. Eur. Phys. J. E 2007, 23, 329
Fabrication of the cilia Macroscopic flaps were produced on a glass substrate coated with polyimide. The polyimide was manually buffed to obtain the desired pre-tilt. The monomeric mix was printed using a commercial Fuji Dimatix printer. The nozzle was heated to 50 C and the substrate was kept at 37 C. Heating of the substrate and the inkjet nozzle helped to evaporate the solvent and the liquid-crystal monomers self-assembled into the splayed orientation. Drop spacing was set so that the drops only coalesced and a uniform print was obtained, in this case 15 m. The samples were cured under nitrogen blanketing at 37 C for 5 min using visible light (A3MA polymer) or ultraviolet light (DR1A polymer). The printer's camera was used to obtain the correct alignment of the prints on the substrate. The cilia were partially released from the substrate by dissolving the sacrificial PVA layer in water, which took at least 3 days for a complete release. After release, the structures were kept in water to avoid sticking to the substrate.
Steady state light response…… Strain response of printed cilia. a,b, Calculated strains from A3MA polymer (filled diamonds) and DR1A polymer (squares), in response to ultraviolet light (250–390 nm) (a), randomly polarized, and to visible light (488 nm) (b), with the polarization state parallel to the molecular director. The inset shows how the bending radius was measured by fitting a circle to the bending part of the flap. = t/r
Summary • A3MA and DR1A polymers can be addressed independently, by actuating the A3MA polymer flaps with visible light and the DR1A flaps with ultraviolet light. • The simple addressing of the cilia by changing the colour of the light allows a well-controlled motion. • Inkjet printing of the actuators opens new possibilities, such as colour printing to vary actuator responsiveness in the plane. • Using reactive liquid crystals, the actuators can be made in only a few processing steps, exploiting the self-assembling capacity of the material. • The processing allows fabrication of large-area and roll-to-roll active all-polymer devices and opens up possibilities for rapid prototyping of low-cost MEMS.