Download
1 / 26
260 likes | 263 Vues
This chapter discusses the Contour Line Method for solving Continuous Space Location Problems. The algorithm for drawing contour lines is explained, along with important notes and examples.

E N D
Outline • 11.3 Techniques for Discrete Space Location Problems • 11.3.1 Qualitative Analysis • 11.3.2 Quantitative Analysis • 11.3.3 Hybrid Analysis
Outline Cont... • 11.4 Techniques for Continuous Space Location Problems • 11.4.1 Median Method • 11.4.2 Contour Line Method • 11.4.3 Gravity Method • 11.4.4 Weiszfeld Method
Algorithm for Drawing Contour Lines: Step 1: Draw a vertical line through the x coordinate and a horizontal line through the y coordinate of each facility Step 2: Label each vertical line Vi, i=1, 2, ..., p and horizontal line Hj, j=1, 2, ..., q where Vi= the sum of weights of facilities whose x coordinates fall on vertical line i and where Hj= sum of weights of facilities whose y coordinates fall on horizontal line j
Algorithm for Drawing Contour Lines (Cont) m Step 3: Set i = j = 1; N0 = D0 = wi Step 4: Set Ni = Ni-1 + 2Vi and Dj = Dj-1 + 2Hj. Increment i = i + 1 and j = j + 1 Step 5: If i < p or j < q, go to Step 4. Otherwise, set i = j = 0 and determine Sij, the slope of contour lines through the region bounded by vertical lines i and i + 1 and horizontal line j and j + 1 using the equation Sij = -Ni/Dj. Increment i = i + 1 and j = j + 1 i=1
Algorithm for Drawing Contour Lines: Step 6: If i < p or j < q, go to Step 5. Otherwise select any point (x, y) and draw a contour line with slope Sij in the region [i, j] in which (x, y) appears so that the line touches the boundary of this line. From one of the end points of this line, draw another contour line through the adjacent region with the corresponding slope Step 7: Repeat this until you get a contour line ending at point (x, y). We now have a region bounded by contour lines with (x, y) on the boundary of the region
Notes on Algorithm for Drawing Contour Lines 1. The number of vertical and horizontal lines need not be equal 2. The Ni and Dj as computed in Steps 3 and 4 correspond to the numerator and denominator, respectively of the slope equation of any contour line through the region bounded by the vertical lines i and i + 1 and horizontal lines j and j + 1
Notes on Algorithm for Drawing Contour Lines (Cont) By noting that the Vi’s and Hj’s calculated in Step 2 of the algorithm correspond to the sum of the weights of facilities whose x, y coordinates are equal to the x, y coordinates, respectively of the ith, jth distinct lines and that we have p, q such coordinates or lines (p < m, q < m), the previous equation can be written as follows
Notes on Algorithm for Drawing Contour Lines (Cont) Suppose that x is between the sth and s+1th (distinct) x coordinates or vertical lines (since we have drawn vertical lines through these coordinates in Step 1). Similarly, let y be between the tth and t+1th vertical lines. Then
Notes on Algorithm for Drawing Contour Lines (Cont) Rearranging the variable and constant terms in the above equation, we get
Notes on Algorithm for Drawing Contour Lines (Cont) The last four terms in the previous equation can be substituted by another constant term c and the coefficients of x can be rewritten as follows Notice that we have only added and subtracted the term
Notes on Algorithm for Drawing Contour Lines (Cont) Since it is clear from Step 2 that the coefficient of x can be rewritten as Similarly, the coefficient of y is
Notes on Algorithm for Drawing Contour Lines (Cont) • The Ni computation in Step 4 is in fact calculation of the coefficient of x as shown above. Note that Ni=Ni-1+2Vi. Making the substitution for Ni-1, we get Ni=Ni-2+2Vi-1+2Vi • Repeating the same procedure of making substitutions for Ni-2, Ni-3, ..., we get • Ni=N0+2V1+2V2+...+2Vi-1+2V1=
Notes on Algorithm for Drawing Contour Lines (Cont) Similarly, it can be verified that
Notes on Algorithm for Drawing Contour Lines (Cont) The above expression for the total cost function at x, y or in fact, any other point in the region [s, t] has the form y= mx + c, where the slope m = -Ns/Dt. This is exactly how the slopes are computed in Step 5 of the algorithm
Notes on Algorithm for Drawing Contour Lines (Cont) 3. The lines V0, Vp+1 and H0, Hq+1 are required for defining the “exterior” regions [0, j], [p, j], j = 1, 2, ..., p, respectively) 4. Once we have determined the slopes of all regions, the user may choose any point (x, y) other than a point which minimizes the objective function and draw a series of contour lines in order to get a region which contains points, i.e. facility locations, yielding as good or better objective function values than (x, y)
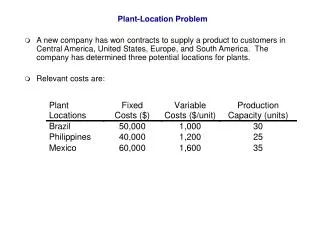
Example 6: Consider Example 5. Suppose that the weight of facility 2 is not 10, but 20. Applying the median method, it can be verified that the optimal location is (10, 10) - the centroid of department 2, where immovable structures exist. It is now desired to find a feasible and “near-optimal” location using the contour line method.
Solution: The contour line method is illustrated using the figure below
Solution: Step 1: The vertical and horizontal lines V1, V2, V2 and H1, H2, H2, H4 are drawn as shown. In addition to these lines, we also draw line V0, V4 and H0, H5 so that the “exterior regions can be identified Step 2: The weights V1, V2, V2, H1, H2, H2, H4 are calculated by adding the weights of the points that fall on the respective lines. Note that for this example, p=3, and q=4
Solution: Step 3: Since set N0 = D0 = -38 Step 4: Set N1 = -38 + 2(8) = -22; D1 = -38 + 2(6) = -26; N2 = -22 + 2(26) = 30; D2 = -26 + 2(4) = -18; N3 = 30 + 2(4) = 38; D3 = -18 + 2(8) = -2; D4 = -2 + 2(20) = 38; (These values are entered at the bottom of each column and left of each row in figure 1)
Solution: Step 5: Compute the slope of each region. S00 = -(-38/-38) = -1; S14 = -(-22/38) = 0.58; S01 = -(-38/-26) = -1.46; S20 = -(30/-38) = 0.79; S02 = -(-38/-18) = -2.11; S21 = -(30/-26) = 1.15; S03 = -(-38/-2) = -19; S22 = -(30/-18) = 1.67; S04 = -(-38/38) = 1; S23 = -(30/-2) = 15; S10 = -(-22/-38) = -0.58; S24 = -(30/38) = -0.79; S11 = -(-22/-26) = -0.85; S30 = -(38/-38) = 1; S12 = -(-22/-18) = -1.22; S31 = -(38/-26) = 1.46; S13 = -(-22/-2) = -11; S32 = -(38/-18) = 2.11;
Solution: Step 5: Compute the slope of each region. S33 = -(38/-2) = 19; S34 = -(38/38) = -1; (The above slope values are shown inside each region.)
Solution: Step 6: When we draw contour lines through point (9, 10), we get the region shown in the previous figure. Since the copiers cannot be placed at the (10, 10) location, we drew contour lines through another nearby point (9, 10). Locating anywhere possible within this region give us a feasible, near-optimal solution.