Download
1 / 13
130 likes | 268 Vues
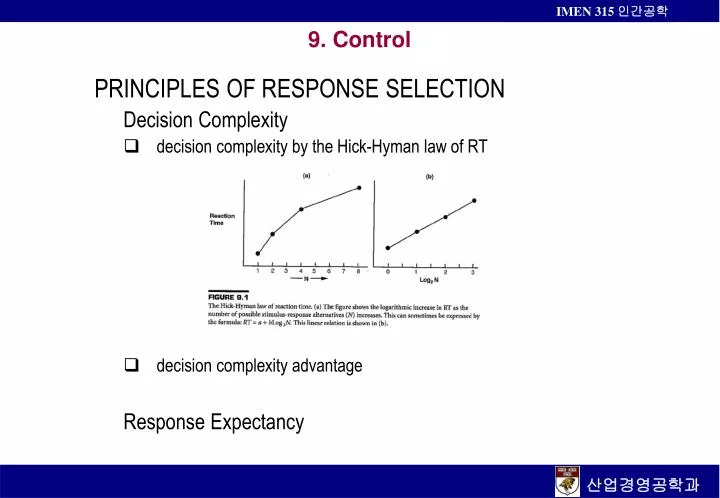
9. Control. PRINCIPLES OF RESPONSE SELECTION Decision Complexity decision complexity by the Hick-Hyman law of RT decision complexity advantage Response Expectancy. Compatibility stimulus-response compatibility location compatibility movement compatibility The Speed-Accuracy Tradeoff

E N D
9. Control PRINCIPLES OF RESPONSE SELECTION Decision Complexity • decision complexity by the Hick-Hyman law of RT • decision complexity advantage Response Expectancy
Compatibility • stimulus-response compatibility • location compatibility • movement compatibility The Speed-Accuracy Tradeoff Feedback • good if nearly instantaneous DISCRETE CONTROL ACTIVATION Physical Feel • toggle switch – visual feedback, auditory click and tactile snap Size. – blunder errors Confusion and Labeling.
POSITIONING CONTROL DEVICES Movement Time • Fitts’ law MT = a + blog2(2A/W) Index of Difficulty = log2(2A/W) Device Characteristics • direct position controls • light pen, touch screen • indirect position controls • mouse, touch pad • indirect velocity controls • joystick (isotonic, isometric, spring-loaded) or cursor keys
usability of controls for pointing • feedback should be salient, visible, immediate (indirect controls) • performance by the system gain G = (change of cursor)/(change of control position) • the gain of direct position controls -- 1.0 • for indirect control devices -- 1.0 to 3.0 Task Performance Dependence • the best overall devices – touch screen, light pen, mouse
VERBAL AND SYMBOLIC INPUT DEVICES Numerical Data Entry • numerical keypads or voice – linear vs. 3 x 3 • 123 (telephone) preferable to 789 (calculator) but a little Linguistic Data Entry • QWERTY, chording keyboard VOICE INPUT Benefits of Voice Control • natural • dual-task situations
Costs of Voice Control • closely related to the sophistication of the voice recognition technology Confusion and Limited Vocabulary Size. • confusion – best guess, feedback (visual for the dual-task benefit) Constraints on Speed. • speak unnaturally slow, speaker-dependent (independent) system Acoustic Quality and Noise and Stress. Compatibility. • less suitable for controlling continuous movement than manual devices
CONTINUOUS CONTROL AND TRACKING The Tracking Loop: Basic Elements • control dynamic – the relationship between the force applied and the steering wheel control output • system dynamics – the relationship between control output and the system response • good operator: o(t) = i(t) or e(t) =0 • closed-loop control system (negative feedback system) System Output Cursor Control Output
errors from command inputs, ic(t), or disturbance inputs, id(t) • pursuit and compensatory tracking displays • tracking performance measured in terms of error, e(t) – MAE, RMSE
The Input • the bandwidth of the input -- the properties of the tracking input, which determines the frequency with which corrections must be issued • bandwidth in terms of the cycles per second (Hz) Control Order Position Control. • the order of a control system – whether a change in the position of the control device leads to a change in the position (zero-order), velocity (first-order), or acceleration (second-order) of the system output VelocityControl. • joysticks • both zero-order (position) and first-order (velocity) controls are important • neutral point • a little lag between when the human applies a force and when the system reaches its desired target position
AccelerationControl. • second-order system – very difficult to control (sluggish and unstable) • anticipate and predict – increased tracking error and workload • perceive trend information – predictor displays Time Delay and Transport Lags • lags require anticipation – a source of human workload and system error Gain G = O /I • gains in the midrange are generally best – reduce effort and maintain stability to some degree Stability
Stability • closed-loop instability (negative feedback instability) – the operator’s well-intentioned but ineffective efforts to correct in a direction that will reduce the error (i.e., to negate the error) • a lag somewhere in the total control loop in Fig 9.4 • too high gain – either the system’s gain or the human’s gain • too rapid correction and not waiting the lagged system stabilized the input bandwidth is high relative to the system lag • 5 solutions to reduce closed-loop instability • lower the gain • reduce the lags • ask operator not to try to correct every input but filter out the high-frequency ones reduce the bandwidth • change strategy to seek input that can anticipate and predict • change strategy to go “open loop”
Open-Loop Versus Closed-Loop Systems • not trying to correct for outputs that may be visible only after system lags • open-loop behavior depends on the operator’s knowledge of • where the target will be • how the system output will respond to his/her control input; that is, a well-developed mental model of the system dynamics • typical trackers of highly skilled in their domain