Download

1 / 17
180 likes | 299 Vues
3nd Global Trajectory Optimization Competition Workshop Team 9. F. Jiang, Y. Li, K. Zhu, S. Gong, H. Baoyin, J. Li, etc. School of Aerospace Tsinghua University Beijing, China. Outline. Team Composition Problem Summary Technical Approach Sequence Selection Global Optimization

E N D
3nd Global Trajectory Optimization Competition WorkshopTeam 9 F. Jiang, Y. Li, K. Zhu, S. Gong, H. Baoyin, J. Li, etc. School of Aerospace Tsinghua University Beijing, China
Outline • Team Composition • Problem Summary • Technical Approach • Sequence Selection • Global Optimization • Local Optimization • Solution • Conclusions
Team Composition • The Team: Comes from the Institute of Dynamics and Control, School of Aerospace, Tsinghua University, China. • Members: One professor, one associate professor, three Ph.D. Candidates, and some Master Candidates • Main Competence Areas: Liquid sloshing in spacecraft container, deep space exploration, spacecraft formation flying • A team not professional in optimization, though have participated to all three GTOCs. (11-th in GTOC1, 10-th in GTOC2, and 11-th in GTOC3)
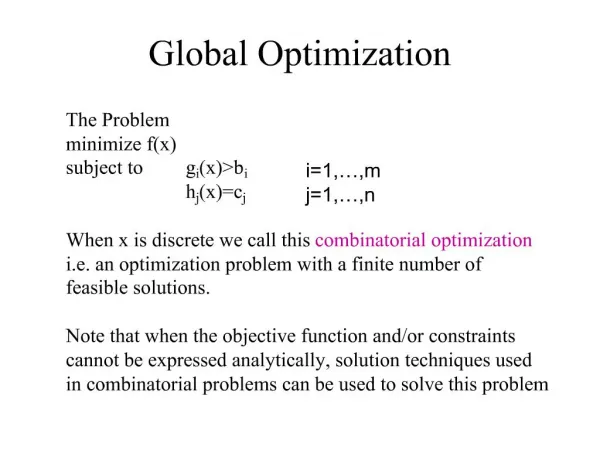
Problem Summary Objective function: Where mi and mf are the initial and final mass, respectively; K=0.2; =10; is the stay-time at the j-th asteroid.
Technical Approach: Sequence Selection(1) • First: Prune these asteroids (about 2/3) with relatively large orbit inclination or eccentricity in advance. • Second: Range the potential sequences on the base of orbit energy differences. (reference:GTOC2 Activities and Results of ESA Advanced Concepts Team)
Asteroid i Asteroid j Sun Technical Approach: Sequence Selection(2) • Third:Range the potential sequences on the base of orbit phase differences. • Initial phase difference, relative to Jan 1, 2016 • Orbit angular velocity difference • Synodic time Asteroid i moves faster than asteroid j by (i, j) degrees per year, while its initial phase lags that of asteroid j by (j, i) degrees.
Technical Approach: Sequence Selection(3) • Synodic times (ST) of potential sequences • Expected sequence: • Actual sequence: By computing the synodic times of potential sequences, no one satisfies absolutely. We select some sequences with a little inconsistent synodic times, such as 88-76-49.
Technical Approach(1) • Astrodynamic model: equinoctial elements • Accommodate all possible conic orbits except i=180°. Conversion from classical orbit elements: Motion equation: Though more complicated Cartesian quantities, they are more efficient in computing.
Technical Approach: Global Optimization(2) • Particle swarm optimization (PSO) • A population based stochastic optimization technique developed by Dr. Eberhart and Dr. Kennedy in 1995, inspired by social behavior of bird flocking or fish schooling • Formulation Objective function Choose N particles with random initial position xi0 and velocity vi0. The iteration from the G generation to G+1 generation can be presented as where r1 and r2 are both uniformly distributed random numbers; w, c1 and c2 should be valued case to case.
Technical Approach: Global Optimization(3) • Differential evolution (DE) • A population based, stochastic function optimization proposed by Price and Storn in 1995 • DE/rand/2/exp Mutation: Crossover: Selection: where F1 and F2 are weighing factors in [0, 1]; the integers rk (k=1,…,5) are chosen randomly in [1, N] and should be different from i; Index n is a randomly chosen integer in [1,D]; Integer L is drawn from [1,D] with the probability Pr(L>=m)=(CR)m-1, m>0. CR is the crossover constant in [0,1];
Technical Approach: Global Optimization(4) • Hybrid algorithm (PSODE) of PSO and DE • In every 50 iterations, use PSO in the former 36 iterations, and DE in the latter 14 iterations. • Population size:400, Iteration times:1000; • Weighing factors of DE are both 0.8; • Maximum velocity:0.5; • Crossover constant:0.618; • c1 and c2 of PSO are both 0.5, ; • Optimize one leg by one leg • Divide each leg into 10 segments. • Departure time and arrival time are optimized according to synodic time.
Technical Approach: Local Optimization(5) • The toolbox of Matlab: Pattern search • Search around the solution obtained by global optimization to satisfy the constraints on position and velocity. • Increase the weight of constraints on position and velocity in objective function.
Solution(1) Leg 2: From A88 to A76 Leg 1: From the Earth to A88 Leg 4: From A49 to the Earth Leg 3: From A76 to A49
Solution(2) The trajectory from the Earth to asteroid 88 The trajectory from asteroid 88 to asteroid 76
Solution(3) The trajectory from asteroid 76 to asteroid 49 The trajectory from asteroid 49 to the Earth
Conclusions and Remarks • Sequence selection based on orbit energy difference and phase difference is available. • The hybrid algorithm of particle swarm optimization and differential evolution seems feasible. • We obtained only one full solution. It is too few, and lacks of comparison. The result of the winner’s sequence 49-37-85 without using gravity assist is worthy to study. • Our team should make great efforts to catch up with top-ranking teams. Up to now, to learn is more than to compete for us. We are trying to develop professional software by FORTRAN, and to be familiar with gravity assist. Wish to do better in the future.