Download

1 / 8
80 likes | 243 Vues
Mobile robot controller. Group 2. Group 2. Leif Hamang Bru Lisa W. Eriksen Kay Are Ulvestad Gunnar René Øie. Introduction. Project problem What we should do The quality attribute in focus was availability. Lookout. Captain. Navigator. Pilot. Uses. Uses. Uses. Uses. Blackboard.

E N D
Mobile robot controller Group 2
Group 2 • Leif Hamang Bru • Lisa W. Eriksen • Kay Are Ulvestad • Gunnar René Øie Group 2 - Robot controller project - TDT4240 Software Architecture
Introduction • Project problem • What we should do • The quality attribute in focus was availability Group 2 - Robot controller project - TDT4240 Software Architecture
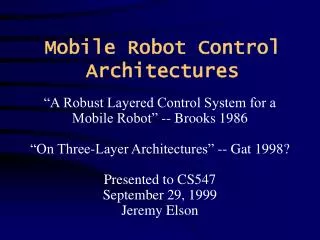
Lookout Captain Navigator Pilot Uses Uses Uses Uses Blackboard Uses Perception subsystem Blackboard architectural pattern Group 2 - Robot controller project - TDT4240 Software Architecture
Attributes realised in architecture • Availability • Redundant blackboards • Voting • Possibility for redundant crewmembers Group 2 - Robot controller project - TDT4240 Software Architecture
We have learned • We should have learned more about the robot before setting our goals, and taken a simpler approach. • Got some more documentation practice. • The ATAM process should be used with larger teams. • Using software architecture may be hard if the system is small and highly interconnected. Group 2 - Robot controller project - TDT4240 Software Architecture
Findings/achievements • ATAM works as a structured way to give feedback. Feedback was valuable, to improve explanation of architectural choices. • Quality requirements are sacrificed to achieve functionality • We were able to make all the modules needed to solve the problem, but didn’t finish putting them together. Why: Discrete movement problem. Group 2 - Robot controller project - TDT4240 Software Architecture
Demonstration Strategy: Build internal map Map-matching Cover map Move all balls