Download
1 / 20
200 likes | 353 Vues
Computational Geometry The art of finding algorithms for solving geometrical problems. Literature: M. De Berg et al: Computational Geometry, Springer, 2000 [1] H. Edelsbruner: Algorithms in Combinatorial Geometry, Springer, 1987[2]

E N D
Computational GeometryThe art of finding algorithms for solving geometrical problems • Literature: • M. De Berg et al: Computational Geometry, Springer, 2000 [1] • H. Edelsbruner: Algorithms in Combinatorial Geometry, Springer, 1987[2] • J. Goodman, J.O‘Rourke: Handbook of Discrete and Computational Geometry, CRC Press, 1997 [3]
Course Structure Mathematic background Algorithms Homework Implementation 15% Oral Exam 50% 35% GRADE
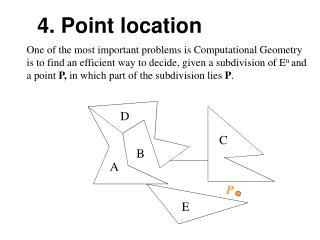
Content • Convex Hulls • Voronoi Diagrams • Polygon Triangulation • Delaunay Triangulation • Point Location
1. Convex Hull 1.1 Euclidean 2-dimensional space E2 Real Vector Space Vn(V,+,•); The affine coordinates of points on the line. a1x1+ a2x2= b (eq. 1) AX = AB X – A = (B - A) X =(1 - )A + B (eq. 2) or (m+n)X=nA + m B(eq. 3) n B (1-l) m X l Figure1 A
is unique in AX = AB, therefore also in (eq. 2). m and n areup to a scalar multiple unique in (eq 3). Such pairs (m,n) of real numbers are called affine coordinates of X wrt. A and B, point X is called an affine combination of the points A and B. Examples: • The midpoint A1 = (B + C)/2 • The foot of the bisector at A (Figure 2) A1 = (Bb + Cc)/(b + c) (Excersise 01) because m:n=b:c • The foot of the normal at A (Figure 3) A1 = (B tan + C tan)/(tan + tan) (Excersise 02) B c A c n /2 /2 /2 A1 b m Figure2 C B A n A1 90o m Figure3 C
B A X μ The affine coordinates in the plane. AX = AB + μAC (eq.4) X= B +μC + (1- - μ)A(eq.5) (l+m+n) X= lB +mC + nA (eq.6) and μ are unique in (eq.4) and (eq.5) l,m,n areup to a scalar multiple unique in (eq 6). Such numbers (l,m,n) are called affine coordinates of X wrt. A,B andC, whereas X is an affine combination of A,B, and C. The coefficients 1 and μ1 in the eq. 4 corresponding to A1 have the property: :μ= 1:μ1= CA1: A1B. (Excersise 04) C B A m A1 μ l C
B C1 A A1 Hence, if (l+m+n) X= lB +mC + nA, then CA1:A1B=l:m, BC1:C1A=n:l, AB1:B1C=m:n. CA1:A1B * BC1:C1A * AB1:B1C = 1 (eq. 7) On the other hand, the lines AA1,BB1,CC1 satisfying eq. 7 intersect or are parallel (Excersise 05). Examples (Excersises 06,07,08): • The baricenter T of ABC satisfies T = (A + B + C)/3 • The center of the inscribed cicrle in ABC satisfies S = (Aa + Bb + Cc)/(a + b + c) • The orthocenter of ABC satisfies • A1 = (A tan + B tan + C tan)/(tan + tan + tan) B1 C
1.2 Affine / Convex Combination Affine combination of points A1, A2,…Ak : 1A1 + 2A2 + … + kAk , 1 + 2 + … + k = 1 Convex combination of points A1, A2,…Ak : 1A1 + 2A2 + … + kAk , 1 + 2 + … + k = 1, 1 ,…, k 0
1.3 Affine / Convex Hull • Affine Hull of a finite set of points A1 ,…, Ak 1A1 + 2A2 + … + kAk : 1 + 2 + … + k = 1 • Convex Hull of a finite set of points A1 ,…, Ak 1A1 + 2A2 + … + kAk : 1 + 2 + … + k = 1, i 0 Affine (Convex) Hull of a set S, notation Aff (S) (Conv (S)), is the set of all affine (convex) combinations of finite subsets of S.
Examlpes • Line AB is the affine hull of A and B. • Plane ABC is the affine hull of noncolinear pointsA, B and C. • Segment [A,B] is the set of points on AB which are between A and B, i.e. the set of convex combinations of A and B. • Triangle ABC is the set of convex combinations of A,B and C.
1.4 Exercises Exercise 1 Prove that if a point B belongs to the affine hull Aff (A1, A2, …, Ak ) of points A1, A2,…, Ak , then: Aff (A1, A2,…, Ak) = Aff (B,A1, A2,…, Ak).
1.4 Exercises (cont.) Exercise 2 • Prove that the affine hull Aff (A1, A2, …, Ak ) of points A1, A2,…, Ak contains the line AB with each pair of its points A,B. • Moreover, prove that Aff (A1, A2, …, Ak ) is the smallest set containing {A1, A2, …, A k } and having this property. [This property therefore may serve as a definition of affine sets. ] (Hint: proof by induction.)
1.4 Exercises (cont.) Exercise 3 Prove that Aff (A1,, A2,…, Ak ) is independentofthe transformation of coordinates. Definition: Affine transformation of coordinates: Matrix multiplication : X -> X• Mnn Matrix translation: X-> X + O’
1.4 Exercises (cont.) Reformulate exercises 1-3 by substituting: • Aff (A1, A2,…, Ak ) with Conv (A1, A2,…, Ak ) • line AB with segment [A,B]. • Definition: Convex set is a set which contains the segment [A,B] with each pair of its elements A and B. Exercise 1’-3’
1.4 Exercises (cont.) If a convex set S contains the vertices A1, A2,…, Ak of a polygon P=A1A2…Ak , it contains the polygon P. (Hint: Interior point property). Exercise 4
1.4 Exercises (cont.) Exercise 5-5’ Prove that Aff (S) (Conv (S)) is the smallest affine (convex) set containing S, i. e. the smallest set X which contains the line AB (segment [AB]) with each pair of points A, B X. Alternatively: Definition: Convex Hull of a set of points S, notation Conv (S) is the smallest convex set containing S.
1.4 Exercises (cont.) Prove that: Aff (A1, A2,…, Ak) = Aff (A1,, Aff (A2,…, Ak)). Conv (A1, A2,…, Ak) = Conv (A1,, Conv (A2,…, Ak)). Exercise 6-6’
1.4 Exercises (cont.) Definiton: A set S of points is said to be affinely (convex) independent if no point of S is an affine combination of the others. Affine (convex) basisBS of a set S is an affinely (convex) independent subset of S such that every point in S is an affine (convex) combination of points from BS. Exercise 7 A set {A1, A2,…, Ak} is affinely independent if and only if 1A1 +…+kAk =0, 1+…+k=0 implies 1=0,…,k=0 . Exercise 8 A set {A1, A2,…, Ak} is affinely independent if and only if the set of vectors {A1A2,…, A1Ak} is linearly independent.
Therefore... Every set in En has an affine basis of k n+1 points. (easy to prove). It has also a convex basis (not easy to prove), which is not necessarily finite. A number of points in an affine basis of a set S is constant and said to be the dimension of S.
Theorem If S is a finite set of points, then Conv (S) is a polygon with the vertices in S. Proof: 1. There is a convex polygon PS with the vertices in S. (for example, Algorithm1) 2. PS= Conv (S).