Download
1 / 16
210 likes | 935 Vues
Kinematics and Dynamics Simulation of the Slider-crank Mechanism Based on Matlab / Simulink. Student : Tz -Han Jung. Liu, Mengsi ; Cao, Y. ; Zhang, Qiuju ; Zhou, Hui Computer Application and System Modeling (ICCASM), 2010 International Conference on 10.1109/ICCASM.2010.5622970

E N D
Kinematics and Dynamics Simulation of the Slider-crank MechanismBased on Matlab/Simulink Student : Tz-Han Jung • Liu, Mengsi ; Cao, Y. ; Zhang, Qiuju ; Zhou, Hui • Computer Application and System Modeling (ICCASM), 2010 International Conference on • 10.1109/ICCASM.2010.5622970 • 2010 , Page(s): V9-557 - V9-563
計畫目標 • 主要將發展推導機械手臂的運動學與反運動學並設計其控制硬體IP: • DH-type 與SCARA-type兩種機械手臂。 • 在ModelSim and Simulink環境下設計與模擬。 • 下載至FPGA晶片使用。 DH-type機械手臂 SCARA-type機械手臂
INTRODUCTION Forward: Given: joint angles q1, q2, q3, q4, q5, q6 Find: end location Inverse: Given: end effector location u, v, w or RPY angles Find: joint angles q1, q2, q3, q4, q5, q6
R-P-Y角 D-H規則
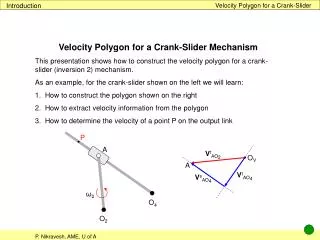
CONCLUSIONS This paper addressed the kinematics and dynamics simulation of the Slider-Crank mechanism. After proposing a mathematical model for the forward displacement of the slider-crank mechanism, the mathematical models for the forward velocity and acceleration of the slider-crank mechanism are constructed, respectively. According to the theory of statical equilibrium, the mathematical model for the forward dynamics of the slider-crank mechanism is constituted as well based on the acceleration analysis of each component part of this mechanism under consideration. Taking into account of mathematical models for the forward kinematics and dynamics of the slider-crank mechanism, simulation models for the forward kinematics and dynamics of the slider-crank mechanism are constituted in the Matlab/Simulinksimulation platform and the forward kinematics and dynamics simulation of the slider-crank mechanism was successfully accomplished based on the Matlab/Simulink simulation platform by which an arduous and complicated mathematical manipulation can be avoided and a lot of computation time can be saved.