Download
1 / 6
60 likes | 166 Vues
This presentation evaluates the error correction capabilities of BCH, RS, and Convolution codes in terms of various parameters such as Tx power, Rx power, memory footprint, and implementation details using MATLAB and Mote devices. Comparison of results, advantages, disadvantages, and recommendations for future convolution codes are discussed. Graphs illustrate the relationship between constraint length, memory, and encoding/decoding time for different code rates. The limitations and assumptions of the study are also presented.

E N D
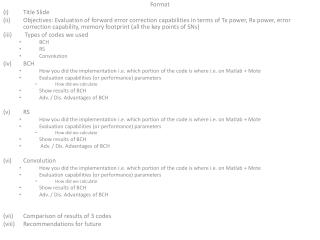
Format Title Slide Objectives: Evaluation of forward error correction capabilities in terms of Tx power, Rx power, error correction capability, memory footprint (all the key points of SNs) Types of codes we used BCH RS Convolution BCH How you did the implementation i.e. which portion of the code is where i.e. on Matlab + Mote Evaluation capabilities (or performance) parameters How did we calculate Show results of BCH Adv. / Dis. Advantages of BCH RS How you did the implementation i.e. which portion of the code is where i.e. on Matlab + Mote Evaluation capabilities (or performance) parameters How did we calculate Show results of BCH Adv. / Dis. Advantages of BCH Convolution How you did the implementation i.e. which portion of the code is where i.e. on Matlab + Mote Evaluation capabilities (or performance) parameters How did we calculate Show results of BCH Adv. / Dis. Advantages of BCH Comparison of results of 3 codes Recommendations for future
Convolution codes Parameters Input bits(k) Output bits(n) Rate (k/n) Constraint length (m) Memory Implementation LFR(Linear feed shift register) Implementing generator polynomial in terms of LFSR Diagram An example polynomial with its implementation over LFSR Limitation of our scheme We have not implemented the bit-interleaver (it will incur more execution time Calculation of execution time at the SINK (how?)
Different configurations Basic Assumption: Computation time will be proportionate on the mote or even slower because of slower crystal on the sensor but it will affect equally to all the configurations of error correction
Graphs • B/w different (for rate = 2) (i) Constraint-Length v/s Memory (all lengths running from 3-9) (ii) Constraint-length v/s Encoding-time (all lengths running from 3-9) (iii) Constraint-length v/s Decoding-time (all lengths running from 3-9)
Graphs • B/w different ( for rate = 3) (i) Constraint-Length v/s Memory (all lengths running from 3-9) (ii) Constraint-length v/s Encoding-time (all lengths running from 3-9) (iii) Constraint-length v/s Decoding-time (all lengths running from 3-9)