Download
1 / 103
1.04k likes | 1.29k Vues
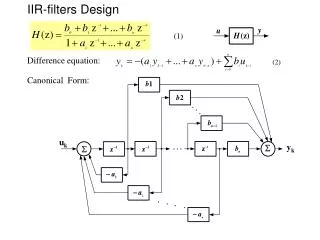
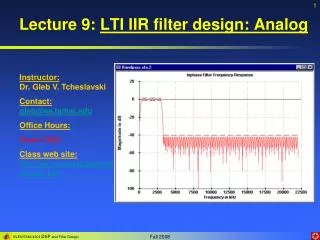
第六章 IIR 滤波器的设计. 主要内容. 理解数字滤波器的基本概念 了解最小相位延时系统 理解全通系统的特点及应用 掌握冲激响应不变法 掌握双线性变换法 掌握 Butterworth 、 Chebyshev 低通滤波器的特点 了解利用模拟滤波器设计 IIR 数字滤波器的设计过程 了解利用频带变换法设计各种类型数字滤波器的方法. 6.1 引言. 数字滤波器:. 是指输入输出均为数字信号,通过一定运算关系改变输入信号所含频率成分的相对比例或者滤除某些频率成分的器件。. 优点:. 高精度、稳定、体积小、重量轻、灵活,不要求阻抗匹配,可实现特殊滤波功能.

E N D
主要内容 • 理解数字滤波器的基本概念 • 了解最小相位延时系统 • 理解全通系统的特点及应用 • 掌握冲激响应不变法 • 掌握双线性变换法 • 掌握Butterworth、Chebyshev低通滤波器的特点 • 了解利用模拟滤波器设计IIR数字滤波器的设计过程 • 了解利用频带变换法设计各种类型数字滤波器的方法
6.1 引言 数字滤波器: 是指输入输出均为数字信号,通过一定运算关系改变输入信号所含频率成分的相对比例或者滤除某些频率成分的器件。 优点: 高精度、稳定、体积小、重量轻、灵活,不要求阻抗匹配,可实现特殊滤波功能
1、滤波器的基本概念 (1) 滤波器的功能 滤波器的功能是对输入信号进行滤波以增强所需信号部分,抑制不要的部分。 a) 时域说明 b) 频域说明
(2) 四种基本的滤波器 四种基本滤波器为低通(LP)、高通(HP)、带通(BP)和带阻滤波器(BRF):
(3) 四种基本滤波器的数字表示 低通 高通 带通 带阻
2、LP到其他滤波器的变换 由LP实现的HP
3、 滤波器的性能指标 • 带宽:当幅度降低到0.707时的宽度称为滤波器的带宽(3dB带宽)
通带、阻带与过渡带:信号允许通过的频带为通带,完全不允许通过的频带为阻带,通带与阻带之间为过渡带。通带、阻带与过渡带:信号允许通过的频带为通带,完全不允许通过的频带为阻带,通带与阻带之间为过渡带。
滚降与滚降率:滤波器幅频特性在过渡带的衰减和衰减速度称为滚降与滚降率。滚降与滚降率:滤波器幅频特性在过渡带的衰减和衰减速度称为滚降与滚降率。
4、数字滤波器的设计步骤 • 数字滤波器的设计三个步骤: (1)按要求确定滤波器的性能参数; (2) 用一个因果稳定的离散线性移不变系统的系统函数去逼近去逼近这一性能要求; (3) 用有限精度的运算实现;实现可以采用通用计算机,也可以采用DSP。
为幅频特性:表示信号通过该滤波器后各频率成分的衰减情况为幅频特性:表示信号通过该滤波器后各频率成分的衰减情况 为相频特性:反映各频率成分通过滤波器后在时间上的延时情况 5、数字滤波器的技术要求 • 选频滤波器的频率响应:
通带: • 阻带: • 过渡带: :通带截止频率 :阻带截止频率 :通带容限 :阻带容限 理想滤波器不可实现,只能以实际滤波器逼近
通带最大衰减: 阻带最小衰减: 其中: 当 时, 称 为3dB通带截止频率
的极点既是共轭的,又是以单位圆成镜像对称的的极点既是共轭的,又是以单位圆成镜像对称的 6、表征滤波器频率响应的特征参量 • 幅度平方响应 H(z)的极点:单位圆内的极点
相位响应: • 相位响应
若滤波器通带内 = 常数, 则为线性相位滤波器 • 群延迟响应 相位对角频率的导数的负值
即为求滤波器的各系数 7、IIR数字滤波器的设计方法 用一因果稳定的离散LSI系统逼近给定的性能要求: • 先设计模拟滤波器,再转换为数字滤波器 s平面逼近:模拟滤波器 z平面逼近:数字滤波器 • 计算机辅助设计法
LSI系统的系统函数: 6.2 最小与最大相位延时系统、最小与最大相位超前系统 频率响应:
模: • 相角:
当 位于单位圆内的零/极矢量角度变化为2p 位于单位圆外的零/极矢量角度变化为 0
令: 单位圆内零点数为mi 单位圆外的零点数为mo 单位圆内的极点数为pi 单位圆外的极点数为po 则:
n < 0时,h(n) = 0 • 因果稳定系统 全部极点在单位圆内:po = 0,pi = N 相位延时系统 1)全部零点在单位圆内: 为最小相位延时系统 2)全部零点在单位圆外: 为最大相位延时系统
n > 0时,h(n) = 0 • 逆因果稳定系统 全部极点在单位圆外:po = N,pi = 0 相位超前系统 1)全部零点在单位圆内: 为最大相位超前系统 2)全部零点在单位圆外: 为最小相位超前系统
1)在 相同的系统中,具有最小的相位滞后 3)最小相位序列的 最大: 4)在 相同的系统中, 唯一 • 最小相位延时系统的性质 2)最小相位延时系统的能量集中在n=0附近,而总能量相同 5)级联一个全通系统,可以将一最小相位系统转变成一相同幅度响应的非最小相位延时系统
对所有w,满足: 称该系统为全通系统 6.3 全通系统
一阶全通系统: 极点: 零点: 极点: 零点: 零极点以单位圆为镜像对称
实系数二阶全通系统 极点: 零点: 两个零点(极点)共轭对称 零点与极点以单位圆为镜像对称
极点: 的根 零点: 的根 • N 阶数字全通滤波器
其中:H1(z)为最小相位延时系统, 为单位圆外的一对共轭零点 • 全通系统的应用 1)任一因果稳定系统H(z)都可以表示成全通系统Hap(z)和最小相位系统Hmin(z)的级联
把H(z)单位圆外的零点: 映射到单位圆内的镜像位置: 构成Hmin(z)的零点。 P231 图6-6 而幅度响应不变:
2)级联一个全通系统可以使非稳定滤波器变成一个稳定滤波器2)级联一个全通系统可以使非稳定滤波器变成一个稳定滤波器 单位圆外极点: 把非稳定系统的单位圆外的极点映射到单位圆内
3)作为相位均衡器,校正系统的非线性相位,而不改变系统的幅度特性3)作为相位均衡器,校正系统的非线性相位,而不改变系统的幅度特性 利用均方误差最小准则求均衡器Hap(z)的有关参数
设计思想: s 平面 z 平面 模拟系统 数字系统 6.4 用模拟滤波器设计IIR数字滤波器 • H(z) 的频率响应要能模仿 Ha(s) 的频率响应, 即 s 平面的虚轴映射到 z 平面的单位圆 • 因果稳定的 Ha(s) 映射到因果稳定的 H(z) , 即 s 平面的左半平面 Re[s] < 0 映射到 z 平面的单位圆内 |z| < 1
设计方法: - 冲激响应不变法 - 阶跃响应不变法 - 双线性变换法
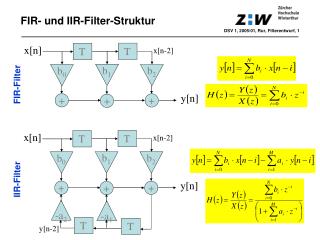
x ( t ) y ( t ) a a h ( t ) a = y ( n ) y ( nT ) a = x ( n ) x ( nT ) a = h ( n ) h ( nT ) a 6.5 冲激响应不变法 一、变换原理 数字滤波器的单位冲激响应h(n) 模仿模拟滤波器的单位冲激响应ha(t) T—抽样周期
设 则:
从频率响应来看: • 数字滤波器的频率响应是模拟滤波器频率响应的周期延拓,周期为2p/T • 只有当模拟滤波器的频率响应是带限的,且带限于折叠频率以内时,即 • 才能使数字滤波器的频响在折叠频率以内重现模拟滤波器的频响而不产生混迭失真
实际系统不可能严格限带,都会混迭失真,在 |W|>Ws/2处衰减越快,失真越小 • 当滤波器的设计指标以数字域频率wc给定时,不能通过提高抽样频率来改善混迭现象
极点:s 平面 z 平面 • 系数相同: • 稳定性不变:s 平面 z 平面
当T 很小时,数字滤波器增益很大,易溢出,需修正 令: 则:
例:设模拟滤波器的系统函数为 试用冲激响应不变法,设计IIR数字滤波器 解:据题意,得数字滤波器的系统函数: 设T = 1s,则
模拟滤波器的频率响应: 数字滤波器的频率响应:
冲激响应不变法的优缺点 • 优点: • h(n)完全模仿模拟滤波器的单位抽样响应ha(t) 时域逼近良好 • 保持线性关系:w=WT 线性相位模拟滤波器转变为线性相位数字滤波器 • 缺点: • 频率响应混迭 只适用于限带的低通、带通滤波器
6.6 阶跃响应不变法 • 变换原理 数字滤波器的阶跃响应g(n) 模仿模拟滤波器的阶跃响应ga(t) T — 抽样周期