Download
1 / 44
620 likes | 1.21k Vues
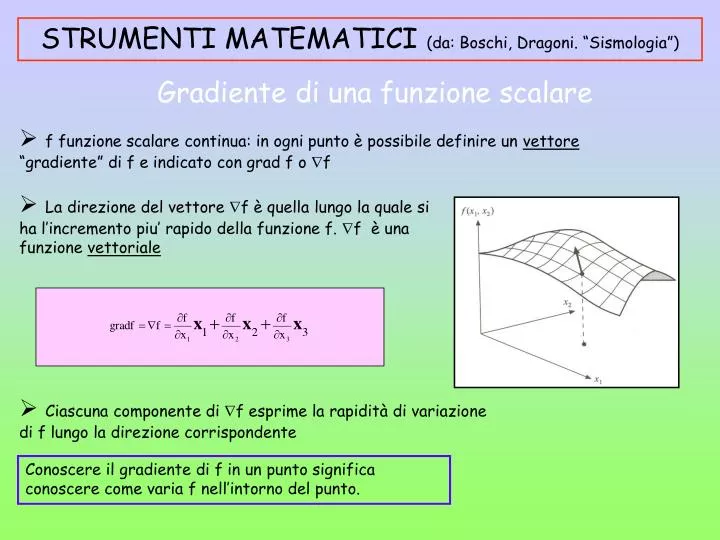
La direzione del vettore f è quella lungo la quale si ha l’incremento piu’ rapido della funzione f. f è una funzione vettoriale. STRUMENTI MATEMATICI (da: Boschi, Dragoni. “Sismologia”). Gradiente di una funzione scalare.

E N D
La direzione del vettore f è quella lungo la quale si ha l’incremento piu’ rapido della funzione f. f è una funzione vettoriale STRUMENTI MATEMATICI (da: Boschi, Dragoni. “Sismologia”) Gradiente di una funzione scalare • f funzione scalare continua: in ogni punto è possibile definire un vettore “gradiente” di f e indicato con grad f o f • Ciascuna componente di f esprime la rapidità di variazione di f lungo la direzione corrispondente Conoscere il gradiente di f in un punto significa conoscere come varia f nell’intorno del punto.
F funzione vettoriale. Consideriamo V un volume finito: si definisce flusso della funzione F attraverso la superficie S: dS è un vettore infinitesimo il cui modulo rappresenta l’area di un piccolo elemento di S; direzione e verso sono quelli della normale n Dividiamo V mediante il diaframma D. Il flusso di F per ciascuna delle due parti V1 e V2 sarà: Dividiamo V in N parti (V1, V2,… VN) si avrà: Assumiamo che N (volumi infinitesimi) e consideriamo il rapporto: • Il limite per N esprime una proprietà caratteristica della funzione F nell’intorno del punto. Esso è chiamato divergenza di F e indicato con div F o • F. Divergenza di una funzione vettoriale Il flusso uscente da V1 attraverso D è entrante inV2: si avrà = 1+ 2
Riscriviamo il flusso di un campo vettoriale F nel modo seguente: Per N e Vi 0 il rapporto tra il flusso e volume diventa la divergenza di F e la sommatoria si trasforma in un integrale. La divergenza di F rappresenta il flusso di F uscente dal volume Vi, per unità di volume, nel caso in cui Vi sia inifinitesimo. E’ una grandezza scalare funzione delle coordinate variando a seconda del punto attorno al quale si calcola il flusso. Teorema di Gauss • Il teorema di Gauss permette di esprimere l’integrale di una funzione vettoriale su una superficie chiusa S tramite un integrale sul volume V racchiuso da essa.
Scegliamo come volume Vi un piccolo parallelepipedo di lati x1, x2 e x3, avente un vertice nel punto (x1, x2, x3). Il flusso netto è uguale alla differenza tra il valore di F3 moltiplicata per l’area x1, x2: Si ottiene risultato analogo per le altre due coppie di facce del parallelepipedo. Il flusso totale uscente dal parallelepipedo sarà: Divergenza in coordinate cartesiane F funzione vettoriale derivabile espressa in un sistema di coordinate cartesiane (x1, x2, x3), tramite le sue tre componenti F1, F2 ee F3, funzioni scalari delle coordinate. Calcoliamo il flusso di F nella direzione di x3:consideriamo le due facce opposte del parallelepipedo rappresentate dai vettori x3x1, x2 e -x3x1, x2 Il flusso di F nella direzione di x3 coinvolge solo la componente F3, poiché le altre due componenti sono perpedicolari a x3e non contribuiscono al flusso
Dividendo per il volume Vi si ottiene: Questa espressione non dipende dalle dimensioni del parallelepipedo e dunque non cambia quando Vi 0 Si puo’ dimostrare che l limite per Vi 0 non dipende dalla forma del Vi considerato. Allora possiamo definire: La divergenza di una funzione vettoriale dà informazioni sul flusso della funzione nell’intorno di un punto: se ad esempio div F è positiva in un punto P, ciò significa che esiste un flusso uscente netto nell’intorno di P. Se tutte e tre le derivate parzili sono positive in P, i vettori del campo F saranno diretti radialmenti rispetto a P. Il campo può avere divergenza positiva anche se è completamente diverso da un capo radiale.
Se prendiamo la divergenza del gradiente di un funzione scalare, otteniamo un’altra funzione scalare unzione scalare, nota come laplaciano della funzione iniziale. Se f è una funzione scalare, si definisce laplaciano di f la funzione: • In coordinate cartesiane l’espressione generale del laplaciano di f diventa: Il significato del laplaciano di f, in un generico punto x0, può essere compreso se si calcola il valore medio di f su un piccolo volume V attorno ad x0: Per calcolare l’integrale possiamo sviluppare f(x) in serie di Taylor attorno ad x0 (x0=0): Il Laplaciano
L’equazione: è detta equazione di Laplace e le funzioni che la soddisfano sono chiamate funzioni armoniche Assumendo che il volume V sia un cubo di lato a, centrato in X0=0 il calcolo dell’integrale fornisce: In un generico punto: Il laplaciano di f è proporzionale alla differenza tra il valore medio di f nell’intorno del punto e il valore di f in quel punto.
Un sistema di coordinate cilindriche è legato alle coordinate cartesiane dalle relazioni: La distanza ds tra due punti infinitamente vicini: Il laplaciano di una funzione f: Un sistema di coordinate sferiche è legato alle coordinate cartesiane dalle relazioni: La distanza ds tra due punti infinitamente vicini: Il laplaciano di una funzione f: Il Laplaciano in coordinate cilindriche e sferiche L’operatore di laplalce assume una forma diversa a seconda del sistema di coordinate che viene utilizzato.
F funzione vettoriale. Consideriamo una curva C che può essere immaginata come la linea che delimita una certa superficie S: si definisce circuitazione di F lungo C l’integrale di linea: dS è un vettore infinitesimo, tangente a C e orientato secondo un verso di percorrenza fissato. Dividiamo S in due circuiti C1 e C2 mediante la curva B La circolazione di F per ciascuno dei due circuiti sarà: Se si assume lo stesso verso di percorrenza si avrà: = 1+ 2 Suddividiamo la superficie S in N parti S1, S2,… SN, racchiuse da N circuiti C1, C2,… CN si avrà: Assumiamo che N e consideriamo il rapporto tra la circolazione e l’area. Poiché occorre tenere conto dell’orientazione della superficie Si nello spazio, l’area è un vettore nSi dove n è il versore normale ad Si, Mantenendo costante n scriviamo il limite: Il rotore di una funzione vettoriale
Si adotta la convenzione per cui il verso di n e quello di percorrenza del circuito Ci soddisfano la regola della “mano destra”. Il limite tra circuitazione e superficie in un punto è uno scalare: se scegliamo tre “circuiti” principali orientati secondo x1, x2 e x3 otteniamo tre scalari diversi, che possiamo considerare come le componenti di un vettore che si chiama rotore di F e si indica con rot F o xF. Il limite tra circuitazione e superficie per un circuito di orientato secondo n è quindi la proiezione del vettore xF nella direzione n Il rotore di F è una grandezza vettoriale funzione delle coordinate del punto. La direzione di rot F è in ogni punto normale al piano, passate per il punto, nel quale la circolazione è massima; la sua intensità è uguale al limite della circolazione per unità di area, in questo piano, attorno al punto in questione.
Riscriviamo la circolazione relativa ad una curva chiusa C: Per N e Si 0 il rapporto tra la circolazione e la superficie diventa il rotore di F e la sommatoria si trasforma in un integrale. Teorema di Stokes • Il teorema di Stokes stabilisce una relazione tra l’integrale di linea di F e l’integrale di superficie di xF
F funzione vettoriale derivabile espressa in un sistema di coordinate cartesiane (x1, x2, x3), tramite le sue tre componenti F1, F2 ee F3, funzioni scalari delle coordinate. Scegliamo un circuito semplice costituito da un rettangolo di lati x1 e x2, di vertice (x1,x2) che limita un elemento di superficie sul piano x1x2. La normale all’elemento di superficie è n= x3. L’integrale di linea va calcolato percorrendo il circuito in senso antiorario. Al calcolo della circolazione lungo i lati paralleli ad x1 contribuisce F1, mentre a quella lungo i lati paralleli ad x2, contribuisce F2. Da cui: Quindi: Rotore in coordinate cartesiane
In base alla definizione di rotore: Analogamente: Si può dimostrare che il risultato non dipende dalla forma delle piccole superfici considerate. Le equazioni precedenti rappresentano le componenti del rotore di F nel sistema di coordinate consideratoL’espressione del rotore è dunque la seguente: Se un campo vettoriale ha rotore diverso da 0 , si dice che possiede una vorticità. Quando invece l’integrale di F lungo tutti i possibili percorsi chiusi è zero, si ha xF =0. Ciò segue dal teorema di Stokes: l’integrale di superficie di xF deve essere nullo ovunque. Dal fatto che la circolazione è nulla per qualunque circuito discende che l’integrale di linea tra due punti non dipende dal percorso effettuato.
Le leggi di trasformazione (delle componenti) da un sistema all’altro vengono usate come mezzo per definire il tensore stesso. Proprietà dei Tensori • Rappresentano grandezze fisiche che sono indipendenti dal particolare sistema di coordinate usato per descriverle. • I tensori possono infatti essere classificati per ordine a seconda della legge di trasformazione cui obbediscono. • Nello spazio euclideo a 3 dimensioni un tensore di ordine n possiede 3n componenti. n=0 scalare, n=1 vettore, n=2 tensore di 2° ordine. Sforzo e deformazione vengono rappresentati da tensori di 2° ordine • Una equazione i cui membri siano tensori dello stesso ordine è detta equazione tensoriale. Il fatto che una relazione tra grandezze fisiche possa essere espressa tramite un’equazione tensoriale assicura che la relazione non muta al variare del sistema di coordinate
I Tensori • Molte grandezze fisiche possono essere espresse tramite un solo numero (massa, volume temperatura). Una tale grandezza viene detta scalare. Le funzioni che descrivono le variazioni (nello spazio) di grandezze scalari sono detti “campi scalari”. T= T(x,y,z) • Per descrivere alcune grandezze un solo numero non è sufficiente (velocità, accelerazione, ecc ecc). E’ necessario specificare oltre alla intensità anche una direzione ed un verso. Tali grandezze vengono dette vettori. Le funzioni che descrivono le variazioni (nello spazio) di grandezze vettoriali sono detti “campi vettoriali”. v= v(x,y,z) • Alcune grandezze (momento di inerzia, suscettività magnetica) non possono essere rappresentate da un vettore. Sono necessari piu numeri 6 … 21. L’insieme di questi numeri è chiamato tensore, e ciascun numero rappresenta una componente del tensore. • I tensori generalizzano il concetto di vettore.
Notazione indiciale • Le componenti di un tensore vengono indicate utilizzando la notazione indiciale: lettera –nocciolo + indici. Ad esempio: ai,Tjkl,ij. Ciascun indice può assumere valori interi da 1 ad 3 (dimensioni dello spazio euclideo). • Quando scriviamo un tensore come Tjk, indichiamo le sue 9 componenti ovvero i 9 numeri che si ottengono facendo variare ciascun degli indici i e j da 1 a 3. Allo stesso tempo il simbolo Tjk indica una grandezza fisica che è indipendente da sistema di coordinate • Sjk =Tjk è una equazione tensoriale che è equivalente alle 9 equazioni scalari che si ottengono facendo variare ciascun degli indici i e j da 1 a 3. • Consideriamo un tensore di ordine n 2. Nel simbolo che rappresenta il tensore un dato indice può comparire una sola volta o più volte. Gli indici che compaiono una sola volta sono detti indici liberi; l’ordine tensoriale di un dato tensore è uguale al numero di indici liberi che compaiono in esso. • Quando un indice compare due volte in un termine, si intende che il termine in esame rappresenta la somma degli N termini che si ottengono facendo assumere all’indice gli N valori del suo campo di variazione (convenzione della sommatoria). Gli indici che compaiono due volte in uno stesso termine si dicono indici sommati
Gli indici sommati possono essere sempre sostituiti con una qualsiasi lettera: il significato de termine non muta. Ad esempio: per questo motivo gli indici sommati sono detti anche fittizi. • Il numero e la collocazione degli indici liberi rivelano direttamente il caratttere tensoriale della quantità espressa tramite la notazione indiciale. I tensori del primo ordine hanno lettere nocciolo munite di un solo indice libero. Ad esempio: sono tutti tensori del primo ordine. Esempio: N.B: secondo il caso il simbolo ai può rappresentare le tre componenti del vettore a, oppure la componente i-esima di tale vettore
I tensori di secondo ordine sono rappresentati con simboli aventi due indici liberi, come Aij Con campo di variazione 1,2,3 per ambedue gli indici, il simbolo Aij rappresenta le 9 componenti del tensore. Un tensore di secondo ordine è spesso rappresentato anche mostrando le sue componenti in una matrice • Altre forme per tensori di secondo ordine: • Seguendo lo stesso schema, i tensori del terzo ordine sono rappresentati da simboli aventi tre indici liberi. Analogamente un simbolo , che non porta alcun indice, rappresenta un tensore di ordine zero, cioè uno scalare. In una equazione tensoriale ogni termine è un tensore dello stesso ordine. Perciò devono comparire come indici liberi le stesse lettere in ogni termine.
I tensori cartesiani dello stesso ordine possono essere sommati algebricamente componente per componente. N. B: in ogni addendo compaiono gli stessi indici liberi nello stesso ordine di successione. • Se si moltiplica ogni componente di un tensore per uno scalare, si ottiene un nuovo tensore dello stesso ordine. Se lo scalare è , esempi di tale prodotto sono: • Dati due tensori di ordine qualsiasi, si chiama prodotto esterno dei due tensori il tensore le cui componenti si ottengono moltiplicando ogni componente di uno dei tensori per ogni componente dell’altro. Questa operazione produce un tensore di ordine uguale lla somma degli ordini dei tensori fattori. Esempi sono: Operazione tra tensori
Tra un vettore ed un tensore di ordine 2 i prodotti interni possibili sono: • Tra un due tensori di ordine due: • Si può avere contrazione anche su più di una coppia di indici. Con una doppia contrazione, il tensore del quarto ordine può dare uno scalare: • La contrazione di un tensore è l’operazione consistente nell’assegnare lo stesso nome (cioè la stessa lettera) a due indici liberi del tensore, trasformandoli cosi’ in indici sommati (deve essere almeno del secondo ordine). Con la contrazione si ottiene un tensore di ordine inferiore di 2 rispetto a quello del tensore originario. • Il prodotto interno o composizione di due tensori è il risultato di una contrazione che riguarda un indice di un tensore e un indice dell’altro, compiuta sul prodotto esterno dei due tensori. L’ordine tensoriale risultante è inferiore di 2 rispetto a quello del prodotto esterno. Il prodotto esterno di due vettori ai e bi è il tensore di ordine 2 aibi, la composizione è invece aibi (ordine 1) che rappresenta il prodotto scalare.
Esistono alcuni tensori speciali, di grande utilità nel calcolo tensoriale. Il tensore di Kronecker (o unità) è un tensore di secondo ordine definito come segue: • La composizione di qualunque tensore con il tensore Kronecker ha come risultato il tensore di partenza, con la mutazione del nome dell’indice sommato: esso assume il nome dell’indice libero del tensore di Kronecker: • Il tensore di Ricci è un tensore del terzo ordine definito come: • Le permutazioni pari sono 123, 231, 312; quelle dispari 213, 321, 132. Non sono permutazioni le terne in cui due o tre numeri sono uguali. Il tensore di Ricci permette di esprimere il prodotto vettoriale a x b nel seguente modo: Tensori “speciali”
Pb: passaggio da un sistema di coordinate ad un altro -> trasformazione dei tensori. Consideriamo due sistemi di coordinate cartesiane x1x2x3 e x’1x’2x’3 aventi la stessa origine O. Se si indica con aij il coseno dell’angolo compreso tra l i-esimo asse con apice e il j-esimo asse senza apice, l’orientamento di ogni asse di un sistema rispetto all’altro è espresso dal tensore aij : Trasformazione dei tensori cartesiani I tre versori x’1 nel sistema con apice sono: Nel sistema senza apice, un generico vettore v può essere espresso dall’equazione; E nel sistema con apice: Dove vj e v’i sono le componenti del vettore nei due sistemi di coordinate
Sostituendo otteniamo: Confrontando le due espressioni di v otteniamo: Questa è la legge di trasformazione dei tensori cartesiani di primo ordine. La formula inversa è la seguente: Con una scelta opportuna degli indici sommati si può ottenere l’equazione: Dato che v è un vettore qualsiasi, l’equazione deve ridursi alla identità: vj= vj Ne segue che il tensore aijaik deve essere uguale a 1 o a 0 a seconda che i valori numerici di j e k siano rispettivamente uguali o diversi, cioè: Questa equazione rappresenta la condizione di ortogonalità dei coseni direttori. Se i coefficienti di una trasformazione lineare soddisfano questa equazione si dice che la trasformazione è ortogonale.
Generalizzando le equazioni di trasformazione al caso di un tensore di secondo ordine Tij otteniamo : Con l’aiuto delle condizioni di ortogonalità si ha anche::
Un tensore di ordine 2 può essere sempre scomposto nel modo seguente: dove i tensori Sij e Aji sono rispettivamente la parte simmetrica e la parte antisimmetrica di Tji, definiti come segue: • Le proprietà relative alla simmetria si possono estendere anche ai tensori di ordine superiore al secondo. In generale si dice che un tensore è simmetrico rispetto ad una coppia di indici se il valore della sua componente non varia scambiando tra loro i due indici. AD esempio: Simmetrie dei tensori • Un tensore di ordine 2 si dice simmetrico se: Tij=Tji ed antisimmetrico se Tij=-Tji
Consideriamo un tensore Tij definito in un punto dello spazio. In quel punto ad ogni direzione, caratterizzata dal versore ni, è possibile associare un vettore vi, dato dal prodotto interno: in generale il vettore vi non avrà la stessa direzione del versore ni. Se il vettore vi risulta parallelo ad ni possiamo scrivere: dove è uno scalare, allora: • Quando questa equazione è soddisfatta, si dice che la direzione individuata da ni è una direzione principale o asse principale del tensore Tij. I versori ni sono chiamati autovettori del tensore. Servendosi dell’identità ni = ijnj: detta equazione degli autovalori, che rappresenta un sistema di tre equazioni nelle 4 incognite ni e , associate ad ogni direzione principale del tensore. In forma estesa: Valori principali e direzioni principali di un tensore
Per qualsiasi valore di esiste la soluzione banale ni =0. Quello che interessa è determinare le soluzioni non banali. Il sistema omogeneo ammette soluzioni non banali se il determinante dei coefficienti è uguale a 0: dal determinante si ottiene un’equazione algebrica di terzo grado in detta equazione caratteristica di Tij, i cui coefficienti sono: Chiamati rispettivamente primo, secondo e terzo invariante di Tij perché il loro valore non muta al variare del sistema di coordinate. Le tre radici dell’equazione algebrica, 1, 2 e 3 sono dette valori principali o autovalori di Tij Un tensore simmetrico con componenti reali ha valori principali reali e, se questi valori sono distinti, le tre direzioni principali sono ortogonali. Se si adatta un sistema di coordinate i cui assi coincidono con gli assi principali, l’espressione matriciale assume forma diagonale.
Un campo tensoriale è una funzione che assegna un tensore Tij(x,t) ad ogni coppia (x,t), dove x è il vettore posizione e t è il tempo. Se le componenti sono funzione solo di x, si dice che il campo è statico. La derivazione delle componenti di un tensore rispetto alle coordinate xi è espressa dall’operatore derivata parziale: . Il simbolo corrispondente nella notazione vettoriale è l’operatore : Riferiamoci ad un sistema di coordinate cartesiane, nel quale il vettore posizione di un punto qualsiasi è dato da: Per esprimere in maniera concisa le derivate parziali di un tensore rispetto alle coordinate xi si può usare la notazione della virgola e dell’indice: Campi tensoriali e derivate di Tensori
Allo stesso modo si possono esprimere in forma compatta gli operatori vettoriali: Anche il teorema di Gauss e di Stokes possono essere espressi con la notazione indiciale:
Le matrici Le matrici sono array ordinati di numeri racchiusi fra parentesi e soggetti a determinate regole matematiche Si definisce ordine di una matrice mxn dove m è il numero di righe ed n il numero delle colonne Ordine 3x3 Ordine 2x3 Nel caso particolare in cui m=1 o n=1 si parla di vettori definiti rispettivamente vettore riga o vettore colonna
Vettore riga n=1 Vettore colonna m=1 Il generico elemento di una matrice è indicato con lettere minuscole, per cui l’elemento di una matrice A nella i-esima riga e j-esima colonna è aij Si definisce matrice trasposta ATdi una matrice mxn, quella matrice ottenuta scambiando righe con colonne. Ne consegue che l’ordine della matrice trasposta sarà nxm 1x3 3x1
La matrice A non è simmetrica Si definisce matrice simmetrica di A, se e soltanto se A è una matrice quadrata (m=n), quella matrice per cui aij=aji per ogni i,j con i diverso da j Se la matrice A è simmetrica vale la relazione A=AT Si definisce matrice diagonale una matrice A i cui coefficienti aij siano tutti uguali a zero per i diverso da j La particolare matrice diagonale che presenta sulla diagonale solo valori unitari è detta matrice identica
Le operazioni fra matrici Uguaglianza fra matrici : A=B se e soltanto se A e B hanno lo stesso numero di righe e di colonne e se per qualsiasi i,j vale la relazione aij=bij A=B Somma e sottrazione fra matrici : due matrici aventi lo stesso ordine possono essere sommate o sottratte nel seguente modo C=A+B ci,j=aij+bij C=A-B ci,j=aij-bij Moltiplicazione per uno scalare : C=kA ci,j=kaij
Prodotto fra matrici : una matrice A di ordine mxn può essere moltiplicata per una matrice B di ordine pxq se e soltanto se n=p (il numeri delle colonne di A deve essere uguale al numero delle righe di B). L’ordine della matrice C prodotto di AB sarà mxq N.B Il prodotto fra matrici non è commutativo per cui AB è diverso da BA
Una matrice A si definisce invertibile se esiste un’altra matrice B tale che AB=BA=I. In questo caso la matrice B si definisce l’inversa di A e si indica con A-1 Ipotizziamo di voler calcolare tramite la definizione appena data l’inversa di una generica matrice A(2x2), ossia cerchiamo le condizioni cui devono soddisfare gli elementi della matrice quadrata B affinché sia BA=I Deve risultare : L’uguaglianza è verificata se :
Definizione di determinante : esso è un numero reale, associato alla matrice quadrata nxn, calcolato nel seguente modo: La matrice è formata da : 1 minore di ordine 3 9 minori di ordine 2 9 minori di ordine 1 Si definisce complemento algebrico di aij il numero Aij prodotto di (-1)i+j per il minore di ordine n-1 ottenuto cancellando la riga i-esima e la colonna j-esima
Definizione di rango di una matrice : il rango di una matrice A(mxn) è il massimo ordine dei suoi minori non nulli. La matrice è formata da : 4 minori di ordine 3 i cui determinanti sono tutti nulli (provare !) Se invece prendiamo il minore di ordine 2 Il suo determinante risulta essere 2 per cui diverso da zero Il rango della matrice A risulta quindi essere 2 perché è il massimo ordine dei suoi minori non nulli
Teorema di Kronecher : sia A una matrice di m righe ed n colonne e sia p l’ordine di un suo minore non nullo. Se tutti i minori di ordine p+1 che contengono il suddetto minore sono nulli, il rango di A è p e viceversa. • In pratica questo teorema consente di calcolare il rango di una matrice seguendo questo procedimento: • Si sceglie un minore di ordine r non nullo • Si calcolano i minori di ordine r+1 che contengono il minore trovato. Se sono tutti nulli il rango risulta essere r; altrimenti se uno di questi è non nullo si ripete il procedimento con questo minore non nullo • Il procedimento termina ovviamente quando si è trovato un minore di ordine p tale per cui tutti i minori di ordine p+1 che lo contengono sono nulli Rango di A=2 Minore non nullo
A cosa servono le matrici Ipotizziamo il seguente sistema di equazioni : In forma matriciale posso scrivere Ax=B dove A è la matrice dei coefficienti e B è la matrice dei termini noti In pratica le matrici permettono di calcolare le soluzioni dei sistemi di equazioni Definizione di autovalori ed autovettori di una matrice e diagonalizzazione di una matrice Il principale obbiettivo, nella risoluzione di un sistema lineare, è quello di ridurre il nostro sistema in una forma in cui sia particolarmente semplice ricavare la soluzione. Se la matrice dei coefficienti è quadrata di ordine n, la sua forma più semplice è quella diagonale: La soluzione è banale
Uno scalare l (che può essere un numero reale) è un autovalore della matrice quadrata A se esiste un vettore non nullo X tale per cui AX= lX. Il vettore non nullo si definisce invece autovettore di A Si può osservare che AX= lX è riscrivibile come AX- lX=0 o ancora (A- lI)X=0 Per cui l è un autovalore di A se e solo se il sistema omogeneo ha soluzione non banale, ossia se il det(A- lI)=0 Gli autovalori sono le soluzioni dell’equazione det(A- lI)=0 =(2- l)(1- l)=0 Gli autovalori sono l=2 e l=1 per cui sostituendo prima 2 e poi 1 nell’equazione (A- lI)X=0 si ottengono gli autovettori X1=(x1,0) e X2=(x1,-x1) Per cui se dovessi diagonalizzare la matrice A a questo punto potrei scrivere la matrice diagonale
N.B L’equazione det(T- lI)=0 è anche chiamata Equazione Secolare A questo punto abbiamo visto come determinare sia glia utovalori che gli autovettori di una matrice. Ma fisicamente cosa sono gli autovettori di una matrice? Gli autovettori di una matrice non sono altro che le direzioni principali. Se prendiamo per esempio il caso del tensore degli sforzi generico: L’equazione det(T- lI)=0 mi restituisce gli autovettori, che altro non sono che le direzioni principali dello sforzo Per cui se utilizzo un sistema di riferimento in cui gli assi sono nella direzione principale degli sforzi, il tensore degli sforzi si riduce ad essere un tensore diagonale
Esercizi ed applicazioni Dato il tensore degli sforzi in un punto P, rispetto agli assi Oxyz, determinare i valori principali e le direzioni principali degli sforzi. Soluzione I valori principali sono la soluzione dell’equazione secolare Risolvendo il determinante I valori principali sono –2,4,1
A questo punto essendo associato ad ogni valore principale una direzione principale degli sforzi i cui coseni direttori ni (k) sono soluzioni delle equazioni Per il valore principale –2 risulta Poiché per i coseni direttori vale la regola Esercitazione: determinare le direzioni principali per i restanti valori principali
Esercitazione: Verificare che il tensore di trasformazione costituito dai coseni direttori appena trovati trasforma il tensore degli sforzi data in quello diagonale relativo alle direzioni principali N.B Matrice coseni direttori Matrice trasposta coseni direttori