Download
1 / 32
320 likes | 413 Vues
Dive into programming the CheapBot-14 robot controller; understand syntax, tokens, and instructions for creating robot actions and controlling I/O pins. Learn about RAM variables, math operations, conditional execution, and key commands like PAUSE. Explore H-bridge motor control and subroutines.

E N D
Make your Robot Controller Count Counting: DEBUG B0 = B0 + 1 GOTO Counting • Look at B0 in the pop-up Debug window Why does this work?
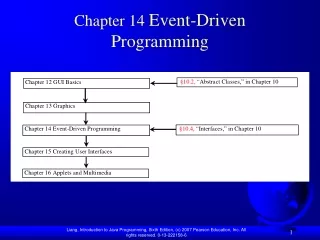
Programs • List of statements • The statements follow rules • Statements are executed one after the other
Tokens and Syntax • Tokens are elements (words) of the programming language • Syntax is the rules for combining tokens
A Robot Program Has… • Input • Output • Math • Conditional Execution • Repetition
RAM Variables • Numbers that your program creates and updates must be stored in RAM • RAM can be updated many times in a program • Each RAM variable has a name that acts like the address of the variable
Token: RAM Variables • Bit (BIT) • Byte (B) • Word (W)
Syntax: RAM Variables • BIT0 to BIT31 • B0 to 27 • W0 to 13 BIT0 = 1 B5 = 215 W2 = 2000
Input/Output Pins • The CheapBot-14 robot controller has 10 pins that connect it to the world • Four control the motors (B.2, B.3, B.4, B.5) • Six are for sensors and actuators (C.0, C.1, C.2, C.3, C.4, B.1)
Token: HIGH and LOW • I/O pins can only be ON or OFF • ON means an I/O pin has 5 volts • OFF means an I/O pin has 0 volts • HIGH turns an I/O pin on (+5V) • LOW turns an I/O pin off (ground)
Syntax: HIGH and LOW HIGH B.4 LOW B.5
HIGH and LOW Notes • A HIGH I/O pin is a source • A LOW I/O pin is a sink • There must be a resistance on an I/O pin before sourcing or sinking current • Maximum current is 30 mA
Token: Math • Numbers exist in RAM variables • Math is carried out in RAM variables
Syntax: Math • Numbers (whole, positive amounts) can be added or subtracted from a value stored in RAM (like B0) • Incrementing (adding 1) • Decrementing (subtracting 1) B0 = B0 + 1 B2 = B2 - 2
Token: IF-THEN • Conditional execution (two different ways) • If condition is true, then jump execution to a label • If condition is true, then execute a block of code
Syntax: IF-THEN IF PINB.1 = 1 THEN Turn_Right IF PINC.3 = 0 THEN HIGH B.2 LOW B.3 PAUSE 100 ENDIF
Light an LED • What command turns on the LED? • What command turns it back off?
Token: PAUSE • The PAUSE command stops the PICAXE from executing anymore commands for a specific length of time.
Syntax: PAUSE PAUSE 1000 • Units of pause in milliseconds with the maximum being 65,535 ms
Blink the LED • Use the following commands to blink the LED • Label • PAUSE • HIGH • LOW • GOTO
Making an H-Bridge Drive a Motor • An H-Bridge makes a motor rotate clockwise, counter-clockwise, or stop based on its two inputs. ClockWise: HIGH B.2 LOW B.3 CounterClockWise: LOW B.2 HIGH B.3 Coast: LOW B.2 LOW B.3 Brake: HIGH B.2 HIGH B.3
Token: GOSUB • Jump execution to a subroutine • Saves program memory • Makes it easier to understand a program
What is a Subroutine? • Subroutines are a simple way to call a series of commands that are used frequently • By replacing all the code with calls to subroutines, you make your program smaller
Syntax: Subroutines • Begins with the name of subroutine (a label) • Ends with a command to go back to where it was called (RETURN) • Between the label and the RETURN is the code you want to execute in the subroutine • Called with the GOSUB command
Example of a Subroutine - some code - GOSUB Rotate - rest of code goes here - Rotate: HIGH B.2 LOW B.3 PAUSE 1000 RETURN
Token: GOTO • Example of code repetition • Unconditional
Syntax: GOTO CheapBot-14: some code more code GOTO CheapBot-14