Download
1 / 77
770 likes | 926 Vues
Luiz M. G. Gonçalves. Robótica: Sistemas Sensorial e Motor. Cinemática. Cinemática. Ramo da dinâmica que trata os aspectos de movimento sem considerar massa e força. Ligações (links): partes individuais físicas (material) que formam coletivamente o corpo de um robô

E N D
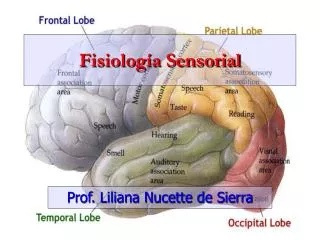
Luiz M. G. Gonçalves Robótica: Sistemas Sensorial e Motor
Cinemática • Ramo da dinâmica que trata os aspectos de movimento sem considerar massa e força. • Ligações (links): partes individuais físicas (material) que formam coletivamente o corpo de um robô • Juntas: estabelecem restrições entre as ligações (graus de liberdade).
Links e Juntas • Juntas podem ser: • Revolutas: executam rotações em torno de um eixo; • Prismáticas: executam deslizamentos num eixo. • Cadeia cinemática: uma montagem de ligações conectadas por juntas
Mecanismos abertos e fechados • Mecanismo: quando um link é fixo (sistema global) e os outros se movem relativamente ao link fixo. • Cadeia fechada: uma cadeia cinemática com todos os links conectados através de juntas a pelo menos dois links adjacentes. • Cadeia aberta: um link pode estar conectado a apenas uma junta (end-effector).
Graus de liberdade (DOF) • Variável de configuração: qualquer parâmetro (comprimento ou angulo) de um mecanismo (sub-restrito) que é necessário para determinar unicamente a configuração do mesmo. • Graus de liberdade: numero mínimo de variáveis de configuração necessárias para definir completamente a configuração do mecanismo.
Relações espaciais • Representação em relação a um frame (sistema de coordenadas) • P (X,Y,Z)
Descrição de referencial • Entidade composta por 4 vetores que fornecem informação sobre a orientação e posição de um ponto num espaço tridimensional (poderia ser ndimentional, no caso, n+1 vetores seriam necessários).
Transformações e mapeamentos • Mapeamentos são usados para mudar a origem de um referencial para outro. • Transformação pode ser entendida como uma função (mapeamento) que leva um objeto (ou corpo) de uma posição a outra num espaço (n-dimensional). • Podem ser lineares (obedecendo a certas regras) ou não lineares (geralmente não é possível de determinar uma regra).
Referenciais transladados (3D) AP = BP +APBorg
Operadores • Mesmas formas podem ser usadas para levar um ponto de uma posição a outra no espaço considerado, ou rodar um vetor de um certo ângulo ou ainda combinar ambos