Download
1 / 1
10 likes | 135 Vues
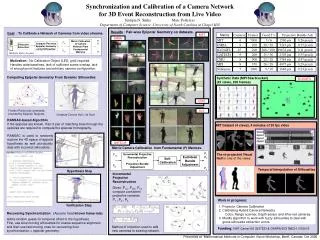
Camera Network Calibration from Dynamic Silhouettes Sudipta N. Sinha Marc Pollefeys Leonard McMillan Department of Computer Science, University of North Carolina at Chapel Hill. Goal : To Calibrate a Network of Cameras from video streams.

E N D
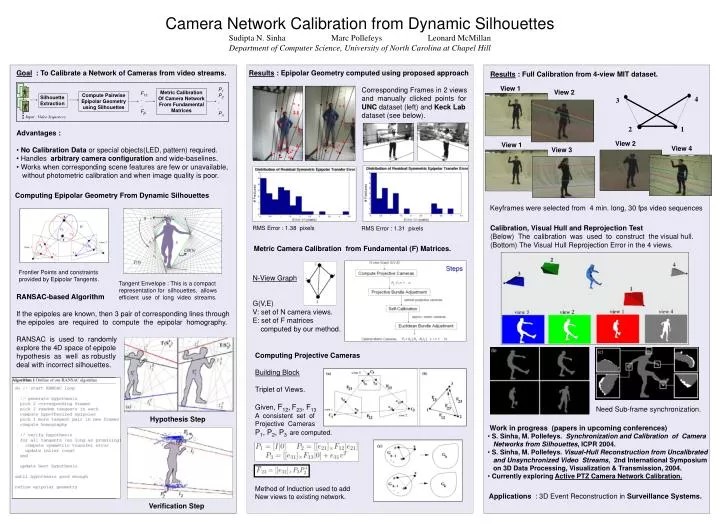
Camera Network Calibration from Dynamic Silhouettes Sudipta N. Sinha Marc Pollefeys Leonard McMillan Department of Computer Science, University of North Carolina at Chapel Hill Goal : To Calibrate a Network of Cameras from video streams. Results : Epipolar Geometry computed using proposed approach Corresponding Frames in 2 views and manually clicked points for UNC dataset (left) and Keck Lab dataset (see below). Results : Full Calibration from 4-view MIT dataset. View 1 P1 P2 . . Pn View 2 Metric Calibration Of Camera Network From Fundamental Matrices F12 . . Fjk Compute Pairwise Epipolar Geometry using Silhouettes Silhouette Extraction 4 3 Input : Video Sequences 2 1 • Advantages : • No Calibration Data or special objects(LED, pattern) required. • Handles arbitrary camera configuration and wide-baselines. • Works when corresponding scene features are few or unavailable, • without photometric calibration and when image quality is poor. View 2 View 1 View 4 View 3 Computing Epipolar Geometry From Dynamic Silhouettes Keyframes were selected from 4 min. long, 30 fps video sequences Calibration, Visual Hull and Reprojection Test (Below) The calibration was used to construct the visual hull. (Bottom) The Visual Hull Reprojection Error in the 4 views. RMS Error : 1.38 pixels RMS Error : 1.31 pixels Metric Camera Calibration from Fundamental (F) Matrices. Frontier Points and constraints provided by Epipolar Tangents. N-View Graph G(V,E) V: set of N camera views. E: set of F matrices computed by our method. Tangent Envelope : This is a compact representation for silhouettes, allows efficient use of long video streams. RANSAC-based Algorithm If the epipoles are known, then 3 pair of corresponding lines through the epipoles are required to compute the epipolar homography. RANSAC is used to randomly explore the 4D space of epipole hypothesis as well as robustly deal with incorrect silhouettes. Computing Projective Cameras Building Block Triplet of Views. Given, F12,F23, F13 A consistent set of Projective Cameras P1, P2, P3 are computed. Method of Induction used to add New views to existing network. Need Sub-frame synchronization. Hypothesis Step • Work in progress (papers in upcoming conferences) • S. Sinha, M. Pollefeys. Synchronization and Calibration of Camera • Networks from Silhouettes, ICPR 2004. • S. Sinha, M. Pollefeys. Visual-Hull Reconstruction from Uncalibrated • and Unsynchronized Video Streams, 2nd International Symposium • on 3D Data Processing, Visualization & Transmission, 2004. • Currently exploring Active PTZ Camera Network Calibration. Applications : 3D Event Reconstruction in Surveillance Systems. Verification Step