Download
1 / 21
210 likes | 326 Vues
LLRF Control System. Outline Token photograph Scope Requirements Design Considerations Evaluation System drawings How this fits into beam-based longitudinal feedback Conclusions. Scope (1).

E N D
LLRF Control System • Outline • Token photograph • Scope • Requirements • Design Considerations • Evaluation • System drawings • How this fits into beam-based longitudinal feedback • Conclusions
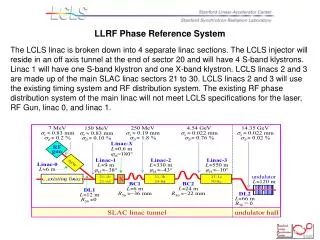
Scope (1) • The low level RF controls system consists of RF phase and amplitude controls at these locations: • Laser • Gun (Klystron 20-6) • L0-A, a.k.a. L0-1 (Klystron 20-7) • L0-B, a.k.a. L0-2 (Klystron 20-8) • L0 Transverse cavity (Klystron 20-5) • L1-S (Klystron 21-1) • L1-X (Klystron 21-2) • L2 - (Klystrons 24-1,24-2,24-3) to control avg phase/ampl of L2 • L3 Transverse cavity (Klystron 24-8) • L3 - 2 sectors of klystrons, S29+S30
Requirements (1) • Meet phase/amp noise levels defined as: • 0.1% rms amplitude • 100 fs rms in S-band (fill time = 850 ns) • 125 fs rms in X-band (fill time = 100 ns) • All tolerances are rms levels and the voltage and phase tolerances per klystron for L2 and L3 are Nk larger, assuming uncorrelated errors, where Nk is the number of klystrons per linac (L2 has 28; L3 has 48)
Requirements (2) • Achieve 120 Hz feedback to maintain phase/amp stability • When beam is present, control will be done by beam-based longitudinal feedback (except for T-cavs); when beam is absent, control will be done by local phase and amplitude controller (PAC) • Adhere to LCLS Controls Group standards: RTEMS, EPICS, Channel Access protocol • Ref: Why RTEMS? Study of open source real-time OS • Begin RF processing of high-powered structures May, 2006
Design considerations • Through end of January 2005, various solutions were evaluated, from 100% COTS modules to hybrids of in-house designed boards. • By May 2005, the options were narrowed down to two: an Off-the-shelf solution and an in-house solution.
Evaluation (1) • The off-the-shelf solution is: • Expensive ($25K per instance * 10 instances) • Noisy. ADCs are up to 150’ from what they measure so analog noise levels and ground loop problems would need to be dealt with • The in-house solution is: • Possibly longer to develop due to board design and fabrication time
Evaluation (2) • Characteristics of the COTS solution were seen as requiring more effort than those of the in-house solution • Potential offered by the lower cost of the in-house solution to replace 250 klystron controllers in the remainder of the LINAC is attractive • Hardware people were available as of 22aug2005 to work on board design if µcontroller was decided • Turned to the EPICS community for ideas and chose a µcontroller
Evaluation (3) • Lower cost alternatives to the $15K VME chassis and IOC were discussed in the session on hardware at the EPICS Collaboration Meeting. April 27-29, 2005 • Of the options presented, only the Coldfire uCdimm 5282 processor had the communication speed and power to meet our data requirements. Cost is $150 per processor plus the development of the board it sits on
Evaluation (4) • By choosing the Arcturus Coldfire uCdimm 5282 processor, we are able to make use of the port of the operating system, RTEMS, which has already been done. • RTEMS is the standard for the real-time operating system chosen for LCLS by the Controls Group • EPICS, the standard for the control system software for LCLS runs on RTEMS • With these choices, the LLRF control system will be fully integrated into the rest of the LCLS EPICS control system and can speak to other devices and applications such as control panels, alarm handlers and data archivers, using Channel Access protocol, the standard communication protocol for this project.
Conclusions • This solution: • corrects the phase and amplitude of the RF at 120 Hz • when there is beam, this system will integrate with the beam-based longitudinal feedback by accepting the latter’s RF phase and amplitude corrections and passing them on • meets the spec for speed and noise • avoids signal noise and ground loop problems • meets LCLS control system requirements and standards running EPICS on RTEMS • provides a low cost path for future upgrade in the rest of the LINAC when the rest of the klystron control is replaced