Download
1 / 8
80 likes | 111 Vues
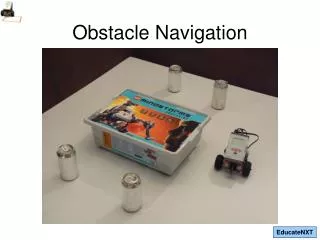
Obstacle Detection System for Wunderbot II. Sonar and IR Sensors Members: Steve Sanko and Snehesh Shrestha. Problem ?. To create a proximity detecting system capable of detecting obstacles from the prospective of a moving robot. Our Objectives.

E N D
Obstacle Detection SystemforWunderbot II Sonar and IR Sensors Members: Steve Sanko and Snehesh Shrestha
Problem ? To create a proximity detecting system capable of detecting obstacles from the prospective of a moving robot
Our Objectives • To be able to detect one or more obstacles during the robot’s travel • Plot a virtual map of the obstacles in real time • Monitor terrain and clearance
Proposed Solution • Use Sonar sensors for detecting distant obstacles [Mid Range] • Use IR sensors for detecting changes in terrain (drop off) and detecting near objects [Short Range]
Sonar Sensors • Device: Devantech SRF04 Sonar Device • Principle: “Ping” is sent and echo is received. Distances is determined by time of flight. • Assumption: If no echo is received within 30 ms then there is no object within range of the sensors
IR Sensors • Device: Sharp GP2D12 Infrared Object Detector • Principle: Transmitted IR beam from one source is reflected back to the receiver. The distance is calculated by the triangle formed
Processing Communicating with sensors through the OOPic II Plus Microcontroller
The End Any Questions ?