Download
1 / 33
330 likes | 457 Vues
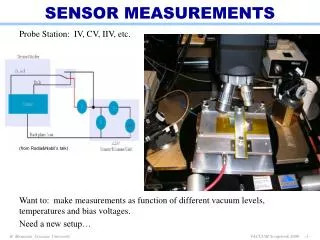
An autonomous multi-sensor probe for taking measurements under glaciers. Dr Kirk Martinez & Dr Jane K. Hart Electronics and Computer Science & Dept. of Geography. Advisors. Prof. Harvey Rutt Dr Joe Stefanov Workshop: Ken Frampton PIC: Tim Forcer.

E N D
An autonomous multi-sensor probe for taking measurements under glaciers Dr Kirk Martinez & Dr Jane K. Hart Electronics and Computer Science & Dept. of Geography
Advisors • Prof. Harvey Rutt • Dr Joe Stefanov • Workshop: Ken Frampton • PIC: Tim Forcer
A Subglacial ProbeAn autonomous multi-sensor probe for taking measurements under glaciers • Introduction • Current Research Methods • Subglacial Probe • Site details • Radar details of ice/sediment • Probe details • Revised Timetable and Conclusion
Introduction • Current day ‘Global Warming’ represents one of major changes to our social and environmental well being • One key element of climate change is the response of glaciers - sea level change, and changes to the thermohaline circulation in the North Atlantic • Vital to understand behaviour of the subglacial bed
Subglacial Deformation • Movement in sediment can comprise 90% of glacier motion • Requires high pore water pressures
Current research methods • Geophysical techniques (seismic and radar) are mostly static and of low resolution • In situ process studies
Ground Penetrating Radar Ground Penetrating Radar, example from Breidamerkurjokull
In situ process studies • Sediment strength (ploughmeter) • Sediment deformation (tiltmeter) • Sediment velocity (dragspools)
SedimentStrength Ploughmeter
Ploughmeter Variations in sediment strength - typical viscous model for sediment behaviour Example from Vestari- Hagafellsjokull, Iceland
Amount of deformation Tilt cells
Tiltmeter -8cm Variations in tilt -15cm Example from Vestari- Hagafellsjokull, Iceland
Amount of deformation/sliding Drag Spools
Summary • Current techniques useful, but because they are tethered they do not behave in a ‘natural’ manner
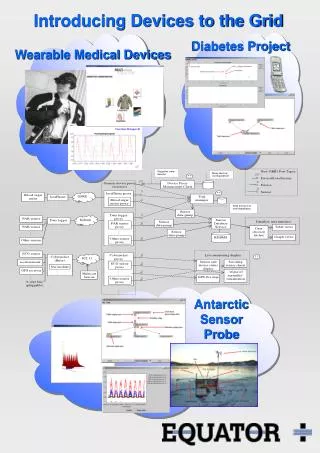
Subglacial Probe • Smart sensor “pebbles” tracked by radio
Site details • Briksdalsbreen in Norway • Advanced 400m since 1988 over silty clay (lake bed) • Average July surface velocity 1996-2000 was 0.33 m/day - basal velocity normally 70% of surface so predicted velocity 0.23 m/day • Expected deforming bed thickness: 0.2 - 0. 3m • Expected ice thickness at drill site: 100m
Properties of ice/sediment • dielectric constant of ice: • ≈ 3.17 ≈ 0.003 • frozen sediments ≈ 3.8 • dry sediments ≈ 4.4 • DC conductivity ≈ 10-5 to 10-6 S m-1
Probe Details • Sediment strength • Sediment deformation • Sediment velocity • Sediment temperature • Holes will be drilled by hot water drill • Probes will be inserted at 5 sites
Sediment Strength • Stress gauges in probe ICE Probe SEDIMENT
Sediment Deformation (rotation) • 10 degree accuracy sufficient • 2 tilt cells ICE Probe SEDIMENT
Velocity(position) • 10-50cm accuracy in position • Transponder ICE Probe SEDIMENT
Temperature and Pressure • 1 – 2 C accuracy sufficient • Thermistor and Pressure sensor ICE Probe SEDIMENT
Basic Design Base Station DGPS Ground station Ice Sediment
Movement in a year Base Station 13m DGPS Ground station Ice 10m 7m 3m Sediment
Probes • Hard oval case probably potting-filled • PIC microprocessor & RAM • Data Transmitter & radar transponder • A/D and amplifiers • Powerful batteries • Sensors: tilt, temp. pressure, … • May measure hourly, transmit and sleep
Radio calculations • Velocity in ice ≈ 0.16 m/ns • 1.8GHz wavelength = 0.167 m • = 4 Im(√) / = 0.063 m-1 • Attenuation = e - L For L = 100m Attenuation = 27 dBm ie within range
Probe Case • Made of strong milled material • two halves • Use join area for antennae • Padded interior
Base Station • Computer with larger storage • Large power supply (lead-acid gell plus Solar top-up) • DGPS for position relative to ground station • Receiver for Probe data • GSM/Satellite phone connection home • Position radar antennas to track probes
Ground Station • DGPS base station to locate base station on glacier
Power estimate • 400mA for 2s every hour is 2AH/year • Lithium AA batteries reach 2-3 AH • Estimate 6 batteries for 7V approx. • Can reduce on/off ratio if necessary
Testing • Mechanical testing of case • Telemetry testing • Sensor testing/calibration • Accelerated power drain testing at -5oC • Traditional instruments will also be inserted in glacier for comparison
Conclusions • Probe allows: • less invasive monitoring of the subglacial • more natural mimicking of clast behaviour • Technical solution is feasible • This will be the first instrument of its kind for earth observations