Download
1 / 29
290 likes | 474 Vues
Chapter 8 Rotational Motion and Equilibrium.

E N D
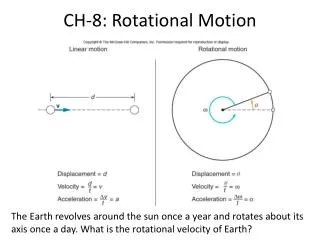
Chapter 8Rotational Motion and Equilibrium Prior to chapter 7, we only considered translational motion, in which objects could always be considered to have no spatial extent. Rotational motion was irrelevant at the time, since such a “point object” can not physically rotate (its radius is zero). In chapter 7, we introduced circular motion. Although some examples involved extended objects such as turntables, we really only considered circular motion of point masses (such as the moon’s orbit about the Earth, or the circular motion of a boy on a merry-go-round). Here, we consider the rotation of extended objects … for example, that of the turntable itself, rather than the circular motion of an ant riding on top of it.
8.1 Rigid Bodies, Translations, and Rotations In PC141, rotational motion can only be analyzed for a rigid body: For instance, a snooker ball is a rigid body. If you consider any two atoms in the ball, the distance between them will be constant even as the ball is rolling, sliding, colliding, etc. On the other hand, a ball of silly putty is not a rigid object, as it can be easily deformed. Realistically, no object is perfectly rigid, since its atoms are constantly vibrating. However, many solid objects can be treated as rigid bodies for the sake of PC141. Even people! a rigid body is an object or system of particles in which the distances between particles are fixed
8.1 Rigid Bodies, Translations, and Rotations Rigid bodies may be subject to either or both of two types of motion – translational and rotational. For example, a chest pass of a basketball gives it almost entirely translational motion. Spinning the ball on your finger gives it entirely rotational motion. Rolling the ball down the court gives it both types (the ball rotates about an axis of symmetry while this axis translates down the court). In pure translational motion, every particle of an object has the same instantaneous velocity.
8.1 Rigid Bodies, Translations, and Rotations On the other hand, for pure rotational motion (“pure” means that the rotation is about an axis that is fixed in space…this axis is not translating or rotating), every particle in the body has the same instantaneous angular velocity, each traveling in circles about the axis of rotation.
8.1 Rigid Bodies, Translations, and Rotations When an object undergoes rolling without slipping, the motion can be described as a combination of pure translation and pure rotation. We’ll discuss this in class.
8.1 Rigid Bodies, Translations, and Rotations Consider an object that undergoes rolling without slipping. In a given time t, it rotates through an angle . A point on the object that was originally in contact with the surface moves through an arc length s. We know from chapter 7 that . We also know from chapter 6 that the CM of the object is directly overtop of the point of contact, and that it moves a distance s (if it did not, this would imply that slipping has occurred). Therefore, By the same argument, it can be shown (p. 269) that
Problem #1: Pure Rotational Motion WBL LP 8.1
Problem #2: Rolling Ball WBL EX 8.5 A ball with a radius of 15 cm rolls on a level surface, and the translational speed of the center of mass is 0.25 m/s. What is the angular speed about the center of mass if the ball rolls without slipping? Solution: In class
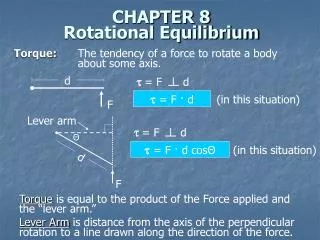
8.2 Torque, Equilibrium, and Stability We have known since chapter 4 that a force is necessary to produce translational acceleration of an object. To produce rotational acceleration of an object, a force is also necessary – however, the situation is a bit more complex. This can be illustrated by an easy experiment. Find a door with a simple hinge mechanism that opens away from you. Using one finger, push the door near the handle. It should rotate quite easily. Then, close the door and push again, this time at a point much closer to the hinge. You will find that it is much more difficult to rotate the door…a much greater force is required in order to achieve the desired angular acceleration of the door about the hinges. Next, try to grab the door handle and pull in a direction away from the hinges. The door won’t rotate at all.
8.2 Torque, Equilibrium, and Stability What this experiment tells us is that a force’s ability to cause rotational acceleration depends not only on its magnitude, but also on (i) its point of application relative to the axis of rotation, and (ii) the angle between the force vector and a vector directed from the axis of rotation to the application point. These two concepts are combined into the moment arm, , where is the distance between the axis and the force application point, and is the angle between and .
8.2 Torque, Equilibrium, and Stability The product of the force and the moment arm is called torque, (Greek lower-case “tau”). The magnitude of the torque is Torque has SI units of m·N. Many textbooks write this as N·m. For once, our authors have made a wise choice – remember, N·m is also the SI unit for work. However, work and torque are not the same thing (for example, the latter is a vector while the former is a scalar…furthermore, work’s units can be expressed as Joules, but torque’s units can not). The direction of is determined by the right-hand rule. If you curl the fingers of your right hand from the direction to the direction, your right thumb points in the direction of . Combining this fact with the equation above indicates that
8.2 Torque, Equilibrium, and Stability The role of torque in rotational motion is analogous to the role of force in translational motion. Any non-zero net torque will result in an angular acceleration, just as any non-zero net force results in a linear acceleration. Examples 8.2 and 8.3 of the text (pp. 270-272) discuss the concept of torque as it applies to kinesiology. You can see (and experience) this concept for yourself at the gym. Most newer exercise equipment is based on the variable cam, which causes a constant mass to appear to get lighter and heavier during a full range of motion. We’ll discuss this in class.
8.2 Torque, Equilibrium, and Stability Equilibrium Since unbalanced forces cause translational acceleration and unbalanced torques cause rotational acceleration, it stands to reason that an object that experiences neither of these imbalances will be at mechanical equilibrium; it will experience no acceleration of either type. The defining equations are and . The situations depicted in parts (a) and (b) of the figure have zero net force and zero net torque (zero torque at all, in fact). The situation in part (c) has zero net force but non-zero net torque. It will experience a rotational acceleration.
8.2 Torque, Equilibrium, and Stability Stability and Center of Gravity An object / particle / system which is at equilibrium can be either stable or unstable in a gravitational field. The stability is determined using the center of gravity (the point at which all the weight of an object may be considered to be acting). For PC141, we will assume that the center of gravity coincides with the center of mass, which we know how to calculate. If you can’t remember the difference between the CM and CG, take a few minutes to review section 6.5 of the text. If an object is in stable equilibrium, any small displacement from equilibrium results in a restoring force or torque, which acts to return the object to the original equilibrium position. In unstable equilibrium, the displacement tends to move the object farther away from the equilibrium position.
8.2 Torque, Equilibrium, and Stability Stability and Center of Gravity cont’ Two examples of systems at stable equilibrium are shown here. On the left, a ball sits at the bottom of a bowl. There are no torques, and the only forces (the ball’s weight, and the normal force) cancel each other out. If the ball is moved to the right, the net force is no longer zero; there is a resultant restoring force that returns the ball to the bottom. On the left, an object is tipped up onto one edge. When tipped slightly, the object’s weight (applied at the CG) produces a restoring torque that returns the object to its original position.
8.2 Torque, Equilibrium, and Stability Stability and Center of Gravity cont’ On the other hand, if a ball is placed at the top of an overturned bowl, it is still in equilibrium (no torques, and weight balances the normal force). However, if the ball is displaced to the right, the net force now acts to continue moving the ball to the right; the ball will not return to the same equilibrium position. Likewise, for the object on the right, a slight clockwise pivot produces a torque about the rotation axis that acts to continue rotating the object in the same clockwise direction. Again, the object will not return to the original equilibrium position; it is unstable.
8.2 Torque, Equilibrium, and Stability Stability and Center of Gravity cont’ Stability of translational equilibrium is usually easy to determine by inspection. For rotational equilibrium, it can be a bit trickier. In summary, we can say that an object is in stable rotational equilibrium as long as its center of gravity after a small displacement still lies above and inside the object’s original base of support.
8.2 Torque, Equilibrium, and Stability The counterweight on a construction crane is used to ensure rotational stability of the crane under heavy loads
Problem #3: Unstable Equilibrium WBL LP 8.7
Problem #4: Tipping a Crate WBL EX 8.15 A worker applies a horizontal force to the top edge of a crate to get it to tip forward. If the crate has a mass of 100 kg and is 1.6 m tall and 0.80 m in depth and width, what is the minimum force needed to make the crate start tipping? Assume that the CM of the crate is at its center, and that the static friction between the crate and ground is sufficient to prevent sliding. Solution: In class
Problem #5: Bicep Muscle WBL EX 8.19 Determine the force exerted by the bicep muscle, assuming that the hand is holding a ball with a mass of 5.00 kg. Assume that the mass of the forearm is 8.50 kg with its center of mass located 20.0 cm away from the elbow joint. Assume also that the center of mass of the ball in the hand is 30.0 cm away from the elbow joint. The muscle contact point is 4.00 cm from the elbow joint. Solution: In class
8.3 Rotational Dynamics Moment of Inertia We have seen that net torque causes rotational acceleration in the same way that net force causes translational acceleration. For the latter, the defining equation is Newton’s 2nd law, . We would like to derive a similar equation that relates τtoα. Consider a constant net force F that acts on a particle of mass m as shown in the figure. The particle is a distance r from the axis of rotation. We already know that . This can be rearranged as . But by Newton’s 2nd law, . Finally, since , we can write .
8.3 Rotational Dynamics Moment of Inertia cont’ The preceding equation is valid for a single particle of mass m, a distance r from the axis of rotation. For an object of finite size, we simply have to add these net torques for every particle in the object: However, for a rigid body, the masses and the distances from the axis can never change. Therefore, the quantity in brackets is a constant.
8.3 Rotational Dynamics Moment of Inertia cont’ This constant is called the moment of inertia, and it is given the symbol I (that’s a capital “i”). It has SI units of kg·m2. All together, we can write This is the rotational form of Newton’s 2nd law. In vector form, the law is The moment of inertia is a property of an object’s geometry and the axis about which it is rotating.
8.3 Rotational Dynamics Moment of Inertia cont’ This figure shows the moments of inertia for various common shapes.
8.3 Rotational Dynamics Moment of Inertia cont’ Comparing parts (j) and (k) of the previous figure, or parts (b) and (c), we see that the moment of inertia changes when the axis of rotation is changed. The parallel axis theorem (which requires calculus to prove) tells us that if the moment of inertia of an object of mass M about an axis passing through the object’s center of mass is , then the moment of inertia for the same object about a different axis that is parallel to the first one but displaced by a distance d is
Problem #6: Moment of Inertia WBL LP 8.9
Problem #7: Angular Acceleration of a Ball WBL EX 8.35 What net torque is required to give a uniform 20-kg solid ball with a radius of 0.20 m an angular acceleration of 20 rad/s2? Solution: In class
Problem #8: Atwood’s Machine with Massive Pulley WBL EX 8.39 Two masses are suspended from a pulley as shown in the figure. The pulley itself has a mass of 0.20 kg, a radius of 0.15 m, and a constant torque of 0.35 m·N due to the friction between the rotating pulley and its axle. What is the magnitude of the acceleration of the suspended masses if m1 = 0.40 kg and m2= 0.80 kg ? Solution: In class