Download
1 / 15
150 likes | 398 Vues
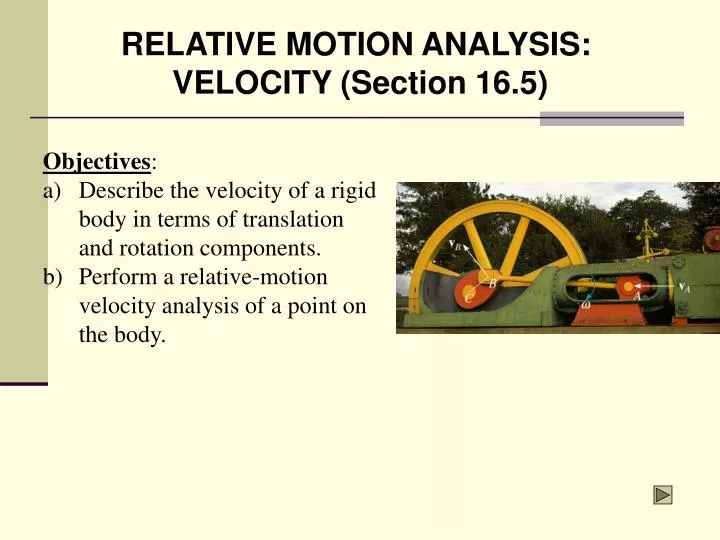
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5). Objectives : Describe the velocity of a rigid body in terms of translation and rotation components. Perform a relative-motion velocity analysis of a point on the body. . APPLICATIONS.

E N D
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) • Objectives: • Describe the velocity of a rigid body in terms of translation and rotation components. • Perform a relative-motion velocity analysis of a point on the body.
APPLICATIONS As block A moves to the left with vA, it causes the link CB to rotate counterclockwise, thus vB is directed tangent to its circular path. Which link undergoes general plane motion? How to find its angular velocity? Gear systems are used in many automobile automatic transmissions. By locking or releasing different gears, this system can operate the car at different speeds.
= Disp. due to translation drB = drA + drB/A Disp. due to rotation Disp. due to translation and rotation RELATIVE MOTION ANALYSIS: DISPLACEMENT A body undergoes a combination of translation and rotation (general motion) Point A is called the base point, has a known motion. The x’-y’ frame translates with the body, but does not rotate. The displacement of B:
= + RELATIVE MOTION ANALYSIS: VELOCITY The velocity at B is :(drB/dt) = (drA/dt) + (drB/A/dt)or vB = vA + vB/A Since the body is taken as rotating about A, vB/A = drB/A/dt = w x rB/A Here w will only have a k component since the axis of rotation is perpendicular to the plane of translation.
RELATIVE MOTION ANALYSIS: VELOCITY (continued) vB = vA + w x rB/A When using the relative velocity equation, points A and B should generally be points on the body with a known motion. Often these points are pin connections in linkages. Both points A and B have circular motion since the disk and link BC move in circular paths. The directions of vA and vB are tangent to the circular path of motion.
RELATIVE MOTION ANALYSIS: VELOCITY (continued) vB = vA + w x rB/A When a wheel rolls without slipping, point A has zero velocity. Furthermore, point B at the center of the wheel moves along a horizontal path. Thus, vB has a known direction, e.g., parallel to the surface.
EXAMPLE 1 Given: Block A is moving down at 2 m/s. Find: The velocity of B at the instant = 45.
EXAMPLE 1 (Solution) vB = vA + wAB x rB/A vB i= -2 j + (wkx (0.2 sin 45 i - 0.2 cos 45 j )) vB i= -2 j + 0.2 w sin 45 j + 0.2 w cos 45 i Equating the i and j components gives: vB = 0.2 w cos 45 0 = -2 + 0.2 w sin 45 Solving: w = 14.1 rad/s or wAB= 14.1 rad/s k vB = 2 m/s or vB = 2 m/s i
EXAMPLE 2 Given:Collar C is moving downward with a velocity of 2 m/s. Find: The angular velocities of CB and AB at this instant.
EXAMPLE 2 (solution) Link CB. Write the relative-velocity equation: vB = vC + wCB x rB/C vB i= -2 j + wCB k x (0.2 i - 0.2 j ) vB i = -2 j + 0.2wCB j + 0.2 wCB i By comparing the i, j components: i: vB = 0.2 wCB => vB = 2 m/s i j: 0 = -2 + 0.2 wCB => wCB = 10 rad/s k
EXAMPLE 2 (continued) Link AB experiences only rotation about A. Since vBis known, there is only one equation with one unknown to be found. vB = wAB x rB/A 2 i = wAB k x (-0.2 j ) 2 i = 0.2 wAB i By comparing the i-components: 2 = 0.2 wAB So, wAB = 10 rad/s k
GROUP PROBLEM SOLVING Given: The crankshaft AB is rotating at 500 rad/s about a fixed axis passing through A. Find: The speed of the piston P at the instant it is in the position shown.
GROUP PROBLEM SOLVING (solution) 1) First draw the kinematic diagram of link AB. Applying the relative velocity equation vB = -50 j m/s
GROUP PROBLEM SOLVING (continued) 2) Now consider link BC. Applying the relative velocity equation: vC = -50 j m/s
End of 16.5 Let Learning Continue