Download

1 / 19
300 likes | 513 Vues
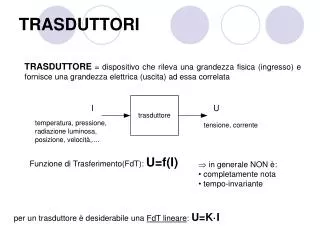
TRASDUTTORI DIGITALI. ENCODER. albero. uscita [V]. tempo. ENCODERS INCREMENTALI. Il segnale di uscita è costituito da una successione di N impulsi per giro ( N numero di incisioni ) Il riferimento angolare viene perduto se si interrompe l’alimentazione. uscita A. uscita Z.

E N D
TRASDUTTORI DIGITALI
uscita [V] tempo ENCODERS INCREMENTALI • Il segnale di uscita è costituito da una successione di N impulsi per giro • (N numero di incisioni) • Il riferimento angolare viene perduto se si interrompe l’alimentazione
uscita A uscita Z • Monodirezionale: • uscita A: N impulsi per giro • uscita Z: 1 impulso per giro (non permette di ricavare il verso di rotazione dell’albero)
Bidirezionale: • uscita A • uscita B • uscita Z rotazione oraria uscita A uscita B A in anticipo su B uscita Z rotazione antioraria uscita A uscita B B in anticipo su A uscita Z
Il numero massimo di incisioni N che si possono realizzare dipende dal diametro del disco • Da N dipende la Risoluzione Angolare : N: 1 ÷ 9000 360 N
t uscita [V] tempo _ t • Possono essere utilizzati per misurare la velocità • angolare di rotazione di un albero: • La rotazione dell’albero può essere ricavata • contando gli impulsi k dal riferimento Z: = k
ENCODERS ASSOLUTI • Disco codificato con n piste (bit) che vengono lette simultaneamente fornendo un’uscita in codice (binario, Gray) • Per ogni settore angolare si ha un codice differente • Con un solo disco il numero • di settori angolari N è pari a: • N = 2n
Dal diametro del disco dipende il numero di piste n (n numero di bit) • Da n dipende la Risoluzione Angolare : n = 2 ÷ 12 360 n 2
In corrispondenza della zona limite non si conosce il valore assoluto della posizione
CODICE GRAY: • cambia solo un bit alla volta
FREQUENZA MASSIMA DI USCITA La capacità del cavo limita la frequenza di uscita arrotondando il fronte d’onda delle onde quadre OUT IN IN OUT
MASSIMA VELOCITA’ ANGOLARE 10 k Frequenze massime tipiche 10 MHz 500 kHz 300 kHz 160 kHz 100 kHz 50 kHz 30 kHz 10 kHz N (numero di divisioni) 100 0 2000 4000 6000 8000 10000 rpm
APPLICAZIONI trasformazione di moto rettilineo in moto rotatorio
ruota metrica controllo velocità angolare di un motore