Download
1 / 1
10 likes | 127 Vues
A New Dynamic Restart Strategy for Randomized Backtrack Search Venkata Praveen Guddeti and Berthe Y. Choueiry Constraint Systems Laboratory • Computer Science & Engineering • University of Nebraska-Lincoln • vguddeti, choueiry@cse.unl.edu. Experiments. Effect of running time: RGR & RDGR.

E N D
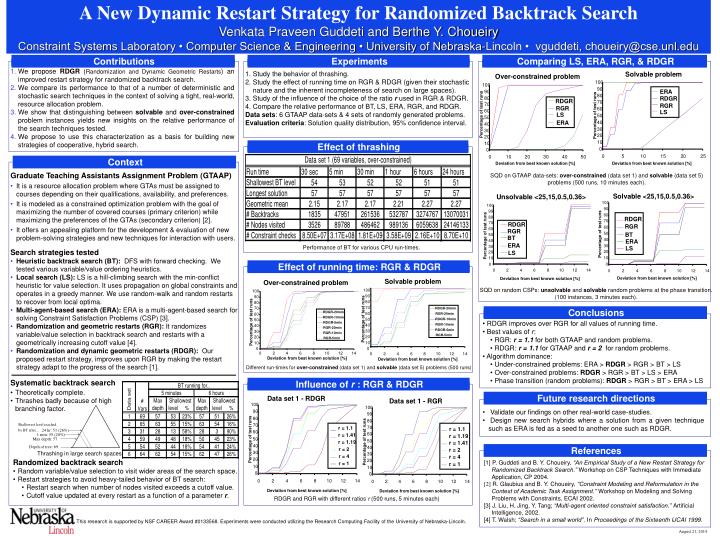
A New Dynamic Restart Strategy for Randomized Backtrack Search Venkata Praveen Guddeti and Berthe Y. Choueiry Constraint Systems Laboratory • Computer Science & Engineering • University of Nebraska-Lincoln • vguddeti, choueiry@cse.unl.edu • Experiments • Effect of running time: RGR & RDGR • Influence of r : RGR & RDGR • Contributions • Conclusions • Effect of thrashing • Comparing LS, ERA, RGR, & RDGR • We propose RDGR (Randomization and Dynamic Geometric Restarts) an improved restart strategy for randomized backtrack search. • We compare its performance to that of a number of deterministic and stochastic search techniques in the context of solving a tight, real-world, resource allocation problem. • We show that distinguishing between solvable and over-constrained problem instances yields new insights on the relative performance of the search techniques tested. • We propose to use this characterization as a basis for building new strategies of cooperative, hybrid search. Over-constrained problem 100 100 90 ERA 90 80 RDGR 80 RDGR 70 70 RGR RGR 60 60 LS LS Percentage of test runs 50 Percentage of test runs 50 ERA 40 40 30 30 20 20 10 10 0 0 0 5 10 15 20 25 0 10 20 30 40 50 Deviation from best known solution [%] Deviation from best known solution [%] Solvable <25,15,0.5,0.36> Unsolvable <25,15,0.5,0.36> 100 90 100 80 90 RDGR 70 80 RGR 70 RDGR 60 60 RGR 50 BT Percentage of test runs 50 Percentage of test runs 40 BT ERA 40 30 ERA LS 30 20 LS 20 10 10 0 0 0 2 4 6 8 10 12 14 0 2 4 6 8 10 12 14 Deviation from best known solution [%] Deviation from best known solution [%] Over-constrained problem Solvable problem 100 100 90 90 80 80 70 70 RDGR-20min RDGR-20min 60 60 RGR-20min RDGR-10min 50 Percentage of test runs 50 RDGR-10min Percentage of test runs RDGR-5min 40 RGR-10min 40 RGR-20min 30 RDGR-5min 30 RGR-10min RGR-5min 20 20 RGR-5min 10 10 0 0 0 2 4 6 8 10 12 14 0 2 4 6 8 10 12 14 Deviation from best known solution [%] Deviation from best known solution [%] Data set 1 - RDGR Data set 1 - RGR 100 100 90 90 80 80 70 70 r = 1.1 r = 1.1 60 60 r = 1.19 r = 1.41 50 Percentage of test runs 50 Percentage of test runs r = 1.41 r = 1.19 40 40 r = 2 r = 2 30 30 r = 4 r = 4 20 20 r = 1 r = 1 10 10 0 0 0 2 4 6 8 10 12 14 0 2 4 6 8 10 12 14 Deviation from best known solution [%] Deviation from best known solution [%] • Study the behavior of thrashing. • Study the effect of running time on RGR & RDGR (given their stochastic nature and the inherent incompleteness of search on large spaces). • Study of the influence of the choice of the ratio r used in RGR & RDGR. • Compare the relative performance of BT, LS, ERA, RGR, and RDGR. • Data sets: 6 GTAAP data-sets & 4 sets of randomly generated problems. • Evaluation criteria: Solution quality distribution, 95% confidence interval. Solvable problem • Context • Graduate Teaching Assistants Assignment Problem (GTAAP) • It is a resource allocation problem where GTAs must be assigned to courses depending on their qualifications, availability, and preferences. • It is modeled as a constrained optimization problem with the goal of maximizing the number of covered courses (primary criterion) while maximizing the preferences of the GTAs (secondary criterion) [2]. • It offers an appealing platform for the development & evaluation of new problem-solving strategies and new techniques for interaction with users. • Search strategies tested • Heuristic backtrack search (BT): DFS with forward checking. We tested various variable/value ordering heuristics. • Local search (LS): LS is a hill-climbing search with the min-conflict heuristic for value selection. It uses propagation on global constraints and operates in a greedy manner. We use random-walk and random restarts to recover from local optima. • Multi-agent-based search (ERA): ERA is a multi-agent-based search for solving Constraint Satisfaction Problems (CSP) [3]. • Randomization and geometric restarts (RGR): It randomizes variable/value selection in backtrack search and restarts with a geometrically increasing cutoff value [4]. • Randomization and dynamic geometric restarts (RDGR): Our proposed restart strategy, improves upon RGR by making the restart strategy adapt to the progress of the search [1]. SQD on GTAAP data-sets: over-constrained (data set 1) and solvable (data set 5) problems (500 runs, 10 minutes each). Performance of BT for various CPU run-times. SQD on random CSPs: unsolvable and solvable random problems at the phase transition. (100 instances, 3 minutes each). • RDGR improves over RGR for all values of running time. • Best values of r: • RGR: r = 1.1 for both GTAAP and random problems. • RDGR: r = 1.1 for GTAAP and r = 2 for random problems. • Algorithm dominance: • Under-constrained problems: ERA > RDGR > RGR > BT > LS • Over-constrained problems: RDGR > RGR > BT > LS > ERA • Phase transition (random problems): RDGR > RGR > BT > ERA > LS Different run-times for over-constrained (data set 1) and solvable (data set 5) problems (500 runs) Systematic backtrack search • Theoretically complete. • Thrashes badly because of high branching factor. • Future research directions • Validate our findings on other real-world case-studies. • Design new search hybrids where a solution from a given technique such as ERA is fed as a seed to another one such as RDGR. Shallowest level reached 24 hr: 51 (26%) by BT after... 1 min: 55 (20%) Max depth: 57 Depth of tree: 69 • References Thrashing in large search spaces • Randomized backtrack search • Random variable/value selection to visit wider areas of the search space. • Restart strategies to avoid heavy-tailed behavior of BT search: • Restart search when number of nodes visited exceeds a cutoff value. • Cutoff value updated at every restart as a function of a parameter r. [1] P. Guddeti and B. Y. Choueiry, “An Empirical Study of a New Restart Strategy for Randomized Backtrack Search.” Workshop on CSP Techniques with Immediate Application, CP 2004. [2] R. Glaubius and B. Y. Choueiry, “Constraint Modeling and Reformulation in the Context of Academic Task Assignment.” Workshop on Modeling and Solving Problems with Constraints, ECAI 2002. [3] J. Liu, H. Jing, Y. Tang; “Multi-agent oriented constraint satisfaction.” Artificial Intelligence, 2002. [4] T. Walsh; “Search in a small world”. In Proceedings of the Sixteenth IJCAI 1999. RDGR and RGR with different ratios r (500 runs, 5 minutes each) This research is supported by NSF CAREER Award #0133568. Experiments were conducted utilizing the Research Computing Facility of the University of Nebraska-Lincoln. August 21, 2014