Realtime Ethernet concept
Realtime Ethernet concept. Controller and HMI. Field devices. Motion control. 100ms. 10ms. <1ms. TCP/IP. Real-time. Ethernet as multi-purpose bus. Ethernet communication in automation Coexistent use of realtime and IT communication on one line

Realtime Ethernet concept
E N D
Presentation Transcript
Realtime Ethernet concept Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
Controller and HMI Field devices Motion control 100ms 10ms <1ms TCP/IP Real-time Ethernet as multi-purpose bus • Ethernet communication in automation • Coexistent use of realtime and IT communicationon one line • Uniform realtime protocol for all requirements • Scalable realtime communication from high-performance to isochronous Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
OPC-DX IEC 61158 & IEC 61784 Ethernet based C. (IEC SC65C Digital Communication) ControlNet/IP PROFInet FF-HSE 1784-1 based RealTime Class 1 ????? CIP Run time; RT-Auto; ACCO FB AP| NMA| MIB SMK User FMS| SMKP| MIB FDA| SNTP|SNMP Application (7) DCOM Transport (4) Encapsulation TCP UDP TCP UDP TCP UDP Network (3) IP IP IP Data Link Layer (2) Modem, ISDN, wireless. ... RealTime Ethernet Class 2 PhLayer (1) IEEE 802.1, IEEE 802.3, IEEE 1588, IEEE 802.x.... Technology specific ISO/OSI Referenz Model Identical for all CPF Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
Realtime Ethernet • Realtime = deterministic data transmission • Ethernet = industrial communication based on IEEE 802 and switching technology • Realtime Ethernet (RTE) classes • No RTE: no provisions for deterministic communication • Low end = Class 1: Cycle times in the range from 5 to 10 msec. Fully compatible with the IP standard and no restrictions on networking components. • High end = Class 2: Cycle times in the range from 0,25 to 5 msec. Fully compatible with the IP standard with networking components supporting RTE Option. Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
RTE Class 2 for motion control • RTE Class 2 covers the requirements for the motion control applications market segment. • RTE Class 2 shall be also fully compatible with the IP standard - with no restrictions. Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
Wood-, glass-and ceramic-processing machines Plastics injection molding machines Packaging machines Printing presses Requirements for motion control applications Real-time capability Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
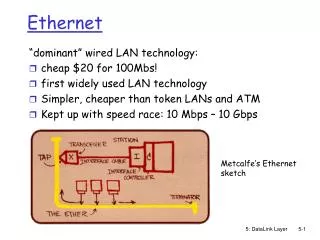
Switching technology - the basis for RTE • RTE utilizes switching technology: • Standard in the office world • Prospects for higher data rates • A large number of stations • Wide network expansion (cascades of 20 or more) • Electrical: 100 m per segment • FO: 3 km per segment • Full-duplex capability • Data streams remain local and do not place load on the entire network • Simple configuring rules Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
1 1 Open IP channel • Device parameterization • Reading of diagnostics data • Loading of interconnections • Negotiation of the communication channel for user data RTE Class 1 channel • High-performance transfer • Priority Tagging • Cyclic data • Event-controlled signals RTE Class 2 channel • High-performance transfer • Data in isochronous mode • Jitter <1μsec Offener TCP/IP Kanal • Geräteparametrierung • Lesen von Diagnosedaten • Laden von Verschaltungen • Aushandeln des Kommunikations-kanals für Nutzdaten Echtzeit Kanal SRT • Performante Übertragung • Zyklische Daten • Ereignisgesteuerte Meldungen Industrial automation applications • IT appli-cations • e.g. • HTTP • SNMP • DHCP... 1 1 Real-time data Standard data TCP / UDP 2 2 Real-time IP 2 SRT RTE Cl.1 RTE Cl.2 3 2 Ethernet 3 Real-time switch Communication architecture with Switch • The RTE class 1 and 2 communication - an integrated and scalable solution - Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
Traffic jam jam jam Separate track to guarantee realtime RTE Cl.2 In case of a traffic jam, even the class 1 traffic stuck RTE-Protocol get priority compared to TCP/IP-protocol. RTE Cl.1 Non RTE Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
Concept for RTE Class 2 • Communication system scheduling - separate time domains for real-time and non-real-time - Open channel (IP) Open channel (IP) RTE channel RTE channel Cycle 2 Cycle 1 Cycle n E.g. 1 ms position control cycle Synchro-nization Deterministic communication Open communication RTE data IP data Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
1 msec <1µsec 250 µsec <1µsec Cycle time Jitter Number of nodes Simultaneously transferable TCP/IP data *) 35 9MB/sec 18 6MB/sec 75 6MB/sec Performance parameters for RTE Class 2 *) Standard length of the IP data packets from 64 to 1536 bytes Max. data transmission rate on Fast Ethernet: 12 MB/sec Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
15% 100% Distribution of updating times Occurence n RTE Cl.2 RTE Cl.1 Non RTE t 0.25...1.0 msec 10 msec 100 msec Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
Consequences to IEEE 802 • Enhancements to the IEEE 802.1D:2003 standard for RTE switched networks: • Amend RTE Option • In IEEE 802.1D or • Specify it separately in IEEE P802.1 or • Specify it separately in IEC SC65C. • Detailed Concepts will be described in IEC SC65C (IEC 61784-2) • Technical topics of the RTE option see next pages Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#
Technical issues on real time switching • Synchronized behaviour based on IEEE 1588-Sync • Common cycle time • Coordinated start of real time schedule • Scheduled forwarding • Shut down of non real time(RT) processing prior to RT phase • Disable non RT forwarding while a port is in RT phase • Scheduling list may be used to guarantee precise delivery • Coordination of application and communication • Ability to run control loops • Eliminate jitter of communication cycle by timestamping • Fast recovery from communication problems • Use redundant paths • Include a means for duplication detection Ludwig Winkel, Karl Weber IEEE 802.1 RTE 2004-01-14.ppt P:#