SEAKEEPING
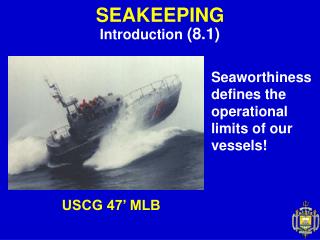
Introduction (8.1). SEAKEEPING. Seaworthiness defines the operational limits of our vessels!. USCG 47’ MLB. Introduction (8.1). SEAKEEPING. The ship is a system excited by external moments and forces. Excitations (inputs) are primarily wind and waves.

SEAKEEPING
E N D
Presentation Transcript
Introduction (8.1) SEAKEEPING Seaworthiness defines the operational limits of our vessels! USCG 47’ MLB
Introduction (8.1) SEAKEEPING • The ship is a system excited by external moments and forces. • Excitations (inputs) are primarily wind and waves. • “RAO” : response amplitude operator • Responses (output) are motions in the six degrees of freedom, plus structural loading.
Introduction (8.1) SEAKEEPING • Ship response depends on two things: • 1. Size, direction, and frequency of the inputs. • 2. The seakeeping and structural characteristics of the ship.
Waves (8.2) SEAKEEPING • Wind and waves are both important but our study is limited to wave systems as this is the dominant input load. • Waves are created by energy supplied to water (from wind, ship’s bow, etc.). • Wave energy is related to wave height by:
The damage included bending the foremast 20 degrees and busting windows on the bridge 40 ft abv the deck! Taken off South Carolina in 1998.
How Waves Are Made (8.2) SEAKEEPING Forces that make waves: • Wind: Most common. Energy transfer through shear stresses. • Geological Events: Seismic activity on the sea bed (i.e. underwater volcanoes, landslides and earthquakes). “Tsunami’s” • Currents: Interaction of ocean currents. Greatly influenced by the coastline’s shape.
SEAKEEPING Wind Generated Wave SystemsFactors for Wave Size (8.2) • Wind Strength: Faster wind = more energy transferred. Strong winds form large waves. • Wind Duration: Longer = larger waves. • Water Depth: Different relationships for deep and shallow water. • Fetch: Area influenced by wind. Larger area = more energy transfer.
SEAKEEPING The Simplified Wave Equation for coastal waters! This won’t be on the exam!
Waves (8.2) SEAKEEPING • Energy transfer is constantly occurring in a wave. • Water viscosity dissipates wave energy by viscous friction. Dissipation increases with wave height. • To maintain the wave height, the energy lost to friction must be replaced.
Wave Life Cycle (8.2) SEAKEEPING • Birth - wind over water creates ripples; high frequency (f), low wave length ().
Wave Life Cycle (8.2) SEAKEEPING • Growing - freq but length and ht as wind continues and energy content of wave system grows.
Wave Life Cycle (8.2) SEAKEEPING • Fully Developed - sea stops growing with wave height and energy content maximized.
Wave Life Cycle (8.2) SEAKEEPING • Reducing - wave system no longer maintained as winds reduce. Waves dissipate (from high to lower freqs) as energy content drops. • Swell - Eventually the wave system consists of low freq, long waves associated with an ocean swell.
Wave Superposition (8.2) SEAKEEPING
Wave Superposition (8.2) SEAKEEPING • Confused seas are modeled as a destructive/constructive interference pattern. • The wave systems are modeled by superimposing sinusoidal wave components, each with their own wavelength, speed, and amplitude. • Bottom Line: We must look at spectral densities and statistical analysis methods to determine wave system and sea properties.
Wave Superposition (8.2) SEAKEEPING
Waves (8.2) SEAKEEPING • Wave Spectrum: analyzing the sea in the frequency domain.
Waves (8.2) SEAKEEPING
Waves (8.2) SEAKEEPING • Modal wave periods from the Sea Spectra Chart are easily converted to modal (or circular) wave frequencies by the following relationship: Don’t confuse this with linear frequency, f=1/T!
Waves (8.2) SEAKEEPING • Each sea state has a predominant modal frequency and significant wave height. • Direction of the seas is assumed to be the same as local, observed wind. • So, we now know the magnitude, direction, and frequency of the Excitation Forces! The next step is understanding the ship motions...
Simple Harmonic Motion (8.3) SEAKEEPING • A harmonic motion is a system where a mass displaced from its “at rest” location experiences a linear restoring force resulting in an oscillating motion. • Linear - size of force or moment is proportional to displacement. “Non-linear” restoring forces work, too. • Restoring - force or moment opposes the direction of motion.
Simple Harmonic Motion (8.3) SEAKEEPING • Common Model: • Mass is displaced, the spring is either in compression or tension with a restoring force trying to return it to the original location. • The size of the force will be proportional to the amount of displacement - a linear force. (F=k·x) • Motion will continue indefinitely if no damping is in the system.
Simple Harmonic Motion (8.3) SEAKEEPING • The mathematics involves analysis of a 2nd order linear differential equation of motion with displacement (z) and time (t) and damping effects (c) =0: • the solution is a simple cosine. • where Z0 is the initial displacement and n is the natural (circular) frequency of the system.
Simple Harmonic Motion (8.3) SEAKEEPING • A plot of the displacement (z) against time (t): • The period (T) can be determined from the plot.
Simple Harmonic Motion (8.3) SEAKEEPING • From the period the natural frequency can be calculated and checked against the observed natural frequency calculated from the known system parameters, mass (m) and spring constant (k).
Simple Harmonic Motion (8.3) SEAKEEPING • Amplitude of spring, mass, damper system may reduce with time due to damping or dissipation effects. • Three conditions: • Under damped: continued oscillations. • Critically damped: one overshoot. • Over damped: no oscillations, slow recovery.
Simple Harmonic Motion (8.3) SEAKEEPING
Simple Harmonic Motion (8.3) SEAKEEPING • Forcing Function and Resonance • For spring- mass-damper system to remain oscillating, energy must be put into system (if damping 0). • This energy is required to overcome the energy being dissipated by the damper. In this system it would be applied as an external force, often called an external forcing function.
Simple Harmonic Motion (8.3) SEAKEEPING • To create maximum displacement, the forcing function has to inject its energy to coincide with the movement of the mass (i.e. be in phase). • So to maintain system oscillation, a cyclical force is required that is at the same frequency as the SHM system. • When this occurs, the system is at resonance and maximum amplitude oscillations will occur. If the forcing function is applied at any other frequency, the amplitude of oscillation is diminished.
Simple Harmonic Motion (8.3) SEAKEEPING • The differential equation for the mass, spring, damper (=0) system with forcing function becomes: • where F is the size of the forcing function and is the frequency at which it is applied. • The solution becomes • (still neglecting damping):
Simple Harmonic Motion (8.3) SEAKEEPING When << n Z = F/K F = forcing function K = spring rate When >> n Z = 0 When = n Z = • System motion amplitude versus • the forcing function frequency.
Simple Harmonic Motion (8.3) SEAKEEPING • The figure below compares a system that is sharply tuned and one that is not. • Lightly damped systems are more “sharply tuned” and are more sensitive to forcing function frequency than those with high damping. Ships are often sharply tuned in some motions...
Ship Response (8.4) SEAKEEPING • As we saw in 8.1, the system output depends on the magnitude and frequency of the excitation force and the ship’s RAO’s. • Excitation force frequency depends on the wave frequency (from sea state table) and ship speed and heading. w=input freq. (Vs=0) wn=natural freq. (if Vs>0) then w= we Recall
Ship Response (8.4) SEAKEEPING Encounter frequency (e) accounts for the relative velocity between ship and waves. Where: ww is the wave frequency V is the ship speed in ft/s. µ is the heading of the ship relative to the direction the waves are moving.
Ship Response (8.4) SEAKEEPING • For a given wave frequency (w), changing course or speed alters e. (Example?)
Ship Response (8.4) SEAKEEPING • Knowing encounter frequency, we can predict ship responses. • The 3 major sets of response can be grouped as: • 1. Rigid Body Motions. • 2. Structural Responses. • 3. Non-oscillatory Dynamic Responses.
Ship Response (8.4) SEAKEEPING • A ship has 6 degrees of freedom about the xyz axis system, 3 rotational and 3 translational. All are rigid body motions.
Rigid Body Motions (8.4) SEAKEEPING • Heave (Z axis translation) • Imbalance between displacement and the buoyant force creates a resultant force which attempts to restore the ship to its original waterline.
Rigid Body Motions - Heave (8.4) SEAKEEPING • The vertical motion is completely analogous to the mass-spring-damper system. • It is possible to predict the natural heave frequency (heave) of a ship.
Rigid Body Motions - Heave (8.4) SEAKEEPING • TPI depends heavily on area of the DWL. • Larger waterplane area for a given displacement equals greater restoring forces. • ‘Beamy’ ships (e.g. tugs) will have short period oscillations and high accelerations (less comfortable). • ‘Narrow’ hulls like frigates, catamarans and SWATH have more gentle heave motions. • Heave is heavily damped.
Rigid Body Motions - Roll (8.4) SEAKEEPING • External wave slopes create internal righting moments to realign “B” and “G”. Rotation is about the X axis. Roll
Rigid Body Motions - Roll (8.4) SEAKEEPING • Righting moment depends on righting arm and ship displacement. • For small angles (in radians) this becomes: • This creates a linear restoring moment which is a rotational SHM.
Rigid Body Motions - Roll (8.4) SEAKEEPING • By rotational analogy to the mass-spring- damper system. • Similarly, the expression for the natural roll frequency (roll).
Rigid Body Motions - Roll (8.4) SEAKEEPING • Combining empirical knowledge and the relationship between natural roll frequency (roll) and period of roll Troll. • where B is the ship’s Beam • C is a constant whose value can range from 0.35 - 0.55 s/ft½ when GMT and beam are measured in ft. (0.44 when damping unknown) What happens if B is increased? T stays about the same! Huh?
Rigid Body Motions - Roll (8.4) SEAKEEPING • GMT value is a compromise between good seakeeping (small GMT) and good stability (large GMT). • Naval Architects design for a GMT of between 5 - 8% of beam as a compromise.
Rigid Body Motions - Pitch (8.4) SEAKEEPING • Pitch (about Y axis) wants to restore vertical alignment of “B” and “G”.
Rigid Body Motions - Pitch (8.4) SEAKEEPING • Internal righting moment acting to restore the ship is linear and depends on MT1" value. • As in roll, rotational motion is analogous to the mass- spring-damper system. • Large MT1" = large moments & accelerations • Motions heavily damped in all cases.
Rigid Body Motions - Resonance (8.4) SEAKEEPING • Resonance - if freq of the forcing function = natural freq of the system: then maximum amplitudes! • To minimize undesirable motions, resonance must not occur. • Since heave, pitch, and roll are SHM, it is important that they do not match with encounter frequency (e).
Rigid Body Motions - Resonance (8.4) SEAKEEPING • Heave and pitch are well damped and as such are not “sharply tuned” (amplified). • Roll motion is sharply tuned, lightly damped, and very susceptible to the encounter frequency!
Ship Response - Structural (8.4) SEAKEEPING • Distinct from rigid body motion, waves can negatively impact ship structural components. • Primary structural loads: • 1. Longitudinal bending: hogging and sagging • 2. Torsion: twisting effect upon the ship structure • 3. Transverse stresses: hydrostatic pressure of the sea