Hyperion Mobility Testing
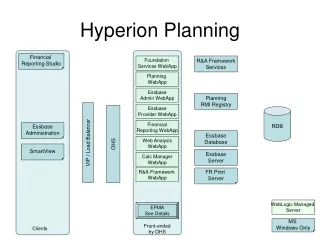
Hyperion Mobility Testing Dimi Apostolopoulos Michael Wagner Kevin Peterson July 28, 2003 Lab and Field Differences Current limits increased to 5 A continuous Rover mass 140 kg in the lab, 180 kg in field Load cell Wall Direction of travel Steel cable Drawbar Pull Tests

Hyperion Mobility Testing
E N D
Presentation Transcript
Hyperion Mobility Testing Dimi Apostolopoulos Michael Wagner Kevin Peterson July 28, 2003 Carnegie Mellon
Lab and Field Differences • Current limits increased to 5 A continuous • Rover mass 140 kg in the lab, 180 kg in field Carnegie Mellon
Load cell Wall Direction of travel Steel cable Drawbar Pull Tests • Drawbar pull is the force a vehicle can pull on a given soil • The drawbar pull is measured by attaching the robot to a load cell and steel cable • The robot is driven until the cable is tensioned and its wheels begin to slip • The drawbar pull is the maximum force sensed by the load cell Carnegie Mellon
Drawbar Pull Tests • Drawbar pull is a useful metric because it can be used to find the maximum climbable slope for a given soil type: • Max slope = atan(DP / weight) • Performed tests in cohesionless sand • This soil provides very little traction, similar to regions of loose sand seen in the Atacama Carnegie Mellon
Drawbar Pull Tests – Results • Robot driving normally • Cable tension rapidly increases • Wheels slipping • Motion controller fault, at least one wheel stops servoing • Robot reverses, cable goes slack c Max DP: 550 N Max slope: 22 deg d b e a Carnegie Mellon
Flat Floor and Climbing Tests • Torque is calculated through the following equation: • T = • These torque measurements are most accurate when robot driving straight and at higher velocities h I V h = 0.35 v / r Carnegie Mellon
Flat Concrete Floor – Power Carnegie Mellon
Flat Concrete Floor – Torque Carnegie Mellon
20-cm Obstacle on Concrete Floor Carnegie Mellon
Sandbox – Power Carnegie Mellon
Sandbox – Torque Carnegie Mellon
20-cm Obstacle in Sandbox Carnegie Mellon
Flat Desert Terrain - Power Carnegie Mellon
Flat Desert Terrain - Torque Carnegie Mellon
10 cm Obstacle in Desert Carnegie Mellon
Slope Climbing Tests Carnegie Mellon
Slope Climbing: 10 deg Wheels climbing onto ramp 35 Nm Entire robot climbing ramp Wheels climbing onto ramp Entire robot climbing ramp 20 Nm Carnegie Mellon
Slope Climbing: 30 deg Entire robot climbing ramp 50 Nm Entire robot climbing ramp 65 Nm Carnegie Mellon
Slope Climbing in the Desert: 10 deg Carnegie Mellon
Slope Climbing in the Desert: 14 deg Carnegie Mellon
Maximum Obstacle Climb in the Desert • Robot is stopped • Left front wheel starts to climb • Left front wheel peaksthe obstacle at a height of 0.239 meters • All four wheels are on flat ground, left rear wheel starts to climb • Left rear wheel peaks the obstacle • Left rear wheel hits the ground and bounces b e a c f d Carnegie Mellon
Rolling Resistance Comparisons • Rolling resistance is the ratio of tractive force to vehicle weight • Tractive force is dependent on soil properties • Rolling resistance in sandbox: 0.03 • Rolling resistance on concrete floor: 0.02 • Rolling resistance on ramp: 0.26 • Rolling resistance in the desert: 0.08 Carnegie Mellon