Advanced solution methods for Stochastic Petri Nets
This presentation by Prof. Susanna Donatelli from the University of Torino focuses on advanced methods for analyzing and verifying stochastic properties of Petri Nets (PNs). It covers qualitative, quantitative, and stochastic questions such as reachability, deadlock avoidance, and timed system evolution. The discussion includes Continuous Stochastic Logic (CSL) application for Stochastic Petri Nets (SPNs) and Generalized Stochastic Petri Nets (GSPNs), addressing symbolic representation and tensor-based techniques, along with case studies and references for deeper understanding.

Advanced solution methods for Stochastic Petri Nets
E N D
Presentation Transcript
Advanced solution methods for Stochastic Petri Nets Prof.ssa Susanna Donatelli Universita’ di Torino, Italy www.di.unito.it susi@di.unito.it
Context (System, question on system) (Model, question on model) (Model, answer on model) (System, answer on system) abstraction model solution backward interpretation
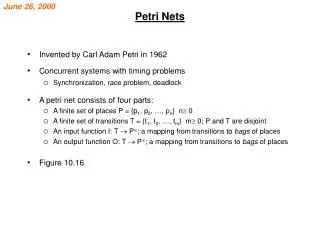
Context • System type: discrete event systems • Categories of questions: • qualitative -- will system reach a deadlock? • quantitative -- will system reach a deadlock before time T? • stochastic -- will system reach a deadlock before time T with probability >0.9 ? • Corresponding classes of models: • finite automata (but also Petri Nets, Process Algebras, etc.) • timed automata • (continuous) time Markov chain ( SPN, GSPN, SWN, Queueing networks, Stochastic Process algebras and stochastic processes in general)
Context • Typical questions/properties • qualitative -- reachability, deadlock, liveness, state/action condition, system evolution (path properties) • quantitative -- timed reachability, timed system evolution (timed path properties) • stochastic -- reachability in probability • We concentrate on stochastic properties for stochastic systems • Revisit CSL for Petri Nets • Go beyond CSL (not only for nets)
Outline • Verifying quantitative behaviour: CSL for SPN and SWN definition and model checking • Verifying quantitative behaviour: CSL for GSPN • Beyond CSL • Solving large (G)SPN: symbolic representation and tensor-based techniques • Bibliographical references
Outline • Verifying quantitative behaviour: CSL for SPN and SWN definition and model checking • Verifying quantitative behaviour: CSL for GSPN • Beyond CSL • Solving large (G)SPN: symbolic representation and tensor-based techniques • Bibliographical references
Recall on SWN • Stochastic Well-formed Nets (SWN) are a colored extension of Stochastic Petri Nets • Color and arc function definition meant to favour a symmetric specification of the system • Symmetries are automatically exploited in state space generation • Underlying stochastic process is a CTMC
Recall on SWN s_srv is enabled for x = color colored place neutral place color domain D = {d1, d2, ..}
Recall on SWN Equivalent GSPN when D = {d1, d2}
Recall on SWN • GSPN state: M(wait_d1)=2 • SWN colored state: M(wait) = 2·d1 • SWN symbolic state: • M(wait)= 2·ZD1, with |ZD1|=1 • M(wait)= 1·ZD1, M(srv) = 1·ZD2, |ZD1|=1, |ZD2|=2 two jobs waiting for the same device equivalence class of all markings with 2 tokens of the same color in place wait one job waiting for a device while two jobs are using the other two devices
Recall on SWN usually much smaller same cardinality
Recall on CSL Model Checking • CSL allows the definition of probabilistic verification statements • Probability of going from a safe to an unsafe state in less than T time units, while traversing only safe states, is <= l. • In equilibrium, system is in safe states with 0.99 probability • Satisfability of the formula on a CTMC requires the solution of a number of "modified" CTMCs
CSL syntax • State formulae (atomic propositions and boolean expression) and path formulae (timed neXt and timed Until) • S<>r(F) is true in states if the sum of the steady state probabilitiesof the F-states, computed usings as initial state, is <>r. • P<>r(F) is true in s if the probability of the paths leaving s which satisfy F is <>r.
CSL examples Examples of CSL: • P0.01(true U[10,20] a) • Satisfied in states from which the probability of reaching an a-labelled state after between 10 and 20 time units is no more than 0.01 • S>0.9(a) • Satisfied in states starting from which the probability of being in an a-labelled state in the long-run is greater than 0.9 • Nested formulae: e.g. P0.1(a U[10,20] S>0.9(bc))
CSL Model Checking • Ingredients of any CSL model checker: • A CTMC or a net model? • A way to define atomic properties of states • Efficient CSL satisfiability algorithms As produced from an SWN defined at the net level: symbolic, colored, or ordinary? reuse existing tools?
CSL & SWN: why • Probabilistic verification of systems expressed as SWN • validate system behaviour "in probability" • natural way to express dependability properties • SWN model validation • particular important since SWN models can be non trivial to specify • limited support is (was) available to validate SWN models
CSL & SWN: how • Exploit reuse: use existing CSL model checking tools • best of the available technology, constantly updated • but does not allow to exploit the peculiarities and properties of nets • Keep simple the definition of atomic propositions
CSL & SWN: how – an example GSPN/SWN tool from the universities of Torino, Piemonte Orientale, Paris-6, Reims CSL model checking facility for SWN models by linking GreatSPN to: • MRMC, the input model is a CTMC • PRISM, the input model is a set of interacting modules specified using a guarded command language from which a CTMC is generated CSL tool from the universities of Twente, Aachen, Munich CSL/PCTL tool of the university of Birmingham
CSL & SWN: how • Language for the definition of atomic properties • For SWN this task is not always straightforward, as we may want to refer to neutral, colored and symbolic properties • Discuss the issues of the link from GreatSPN SWN solver to to MRMC and PRISM (which solution for which type of property)
CSL & SWN: how Marking properties • (Type M):åpP wp · M(p) ≤ K • e.g: M(loc)>1 • e.g.: M(loc) + M(wait) < 2 • (Type Mcol):åp P, c CD(p)wp,c · M(p)[c] ≤ K • e.g: M(wait)[d1] >= 2 • e.g.: M(wait)[d1] + M(srv)[d2] = 2 • (Type Msymb):Two tokens of the same color in place p and p’? --- not so obvious
CSL & SWN: how Transition enabling properties • (Type T): transition t is enabled • e.g.: s_srv is enabled, • s_srv_d1 is enabled • (Type Tcol): transition t is enabled for a given assignment to the variables of t. • e.g.: s_srv is enabled for x=d1 • (Type Tsymb): transition t is enabled for x=y
Linking GreatSPN to MRMC • MRMC works with two input files: • the CTMC rate matrix • CTMC generated using GreatSPN from the RG/CRG or SRG • the list of the atomic propositions valid in each state
Atomic properties in symbolic marking M(wait)= 1·ZD1, M(srv) = 1·ZD2, |ZD1|=1, |ZD2|=2 (one job waiting for a device while two jobs are using the other two devices) the property is true for only 2 of the 3 states in the equivalence class Labelling states with atomic properties
Atomic properties Solving the red problem: observation transitions
Atomic properties test2 s_srv enabled for x=d1 x = d1 <x> <x> <x> <x> a token of color d1 in place wait x = d1 test1 <x>
Atomic properties 2<x> 2<x> two tokens of the same color in place wait Observation transitions can be used to define also symbolic (symmetric) properties
Linking GreatSPN to MRMC user .net wait>=4 wait_d1>=4 wait_d2>=4 GreatSPN .ap .net GreatSPN2MRMC GMC2MRMC STATES 352 TRANSITIONS 1206 1 2 1.000000 1 3 1.000000 2 4 10.000000 … .tra .xlab #DECLARATION t_HS #END ... 25 wait>=4 wait_d1>=4 ... 34 wait>=4 wait_d2>=4 ... .lab APGenerator 1 av(1<d2>1<d1>) loc(8) tloc 2 av(1<d2>1<d1>)loc(7)wait(1<d1>) s_srv_d1 ...
Linking GreatSPN to PRISM • The PRISM input language is a state-based language • State = valuation of a number of bounded variables • A set of guarded commands describes the dynamics of the system: from them PRISM derives the CTMC • Atomic propositions are implicitly defined,as a CSL formula can include any logical condition on the variables' values
Linking GreatSPN to PRISM • Two possible ways to connect to PRISM: • produce a Prism module directly from the SWN, such that the same CTMC (up to state numbering) is produced; • produce a Prism module directly from the CTMC of the SRG/RG definition of atomic propositions? • unfolding the SWN into an SPN, followed by the translation of the SPN into a PRISM module using the already-existing translation for SPN. • Current solution does the unfolding, since it is easier and there is already a GSPN->Prism translator.
Linking GreatSPN to PRISM • For GSPN place names are mapped one-to-one to variable names • no particular support is needed to translate M and Mcol atomic propositions • T and Tcol propositions have to be restated in terms of markings (variable values). • The unfolding algorithm names unfolded places using color names (e.g.: srv_d1)
Linking GreatSPN to PRISM .net .net GreatSPN unfolding .def .def const int N = 4; module M … wait_d2 : [0..4]; av_d2 : [0..1] init 1; …. [tloc_0] (loc_ > 0) & (wait_d1 < N) -> 1.000000 : (wait_d1’ = wait_d1 +1) & (loc_’ = loc_ -1); ….. [back_1] (un_av_d2 > 0) & (av_d2 < 1) -> 10.000000 : (av_d2’ = av_d2 +1) & (un_av_d2’ = un_av_d2 -1); Great2Prism .sm
model checking example • (F1) : S>0.7(hot spot) • the system has a probability > 0.7 of being in an hot-spot state • (F2) : S≤0.2(P≥0.9(F[0,5]hot spot)) • probability of being, in equilibrium, in “dangerous” statesis at most 0.2. • (F3) : P≥0.9(F[0,5](hot spot & P≥0.7(F[0,3]¬hot spot)) dangerous states good hot spot states