Intelligent Grasping
Intelligent Grasping. Hani William Supervisors: Ass. Prof. Yousef Ibrahim Dr. Barry Richardson. Introduction. What is intelligent grasping? Is there stupid Grasping? Why do we need intelligent grasping?. Sequence of intelligent grasping. How human achieves grasping?

Intelligent Grasping
E N D
Presentation Transcript
Intelligent Grasping Hani William Supervisors: Ass. Prof. Yousef Ibrahim Dr. Barry Richardson
Introduction • What is intelligent grasping? • Is there stupid Grasping? • Why do we need intelligent grasping?
Sequence of intelligent grasping • How human achieves grasping? • What is the equivalent sequence of intelligent grasping for a Robot?
What is the equivalent sequence of grasping for a Robot How human achieves grasping Building a data base of object (ex:using neural networks) Identify the target (3D object recognition) Seek the target using sensors (ex:visual) Having a prior knowledge of the object Identify the target among other objects • Move the robot arm (using robot software and based on visual and position sensors) • Preshape the gripper based on contact points locations Seek the target • Move the arm towards the object • Preshape the hand to hold the object Recomputing the values of forces and torques based on feedback from tactile and force sensors Hopefully Contact with initial values of forces & torques Refine the grasping and reposition the fingers Contact between hand and object Successful grasp achieved
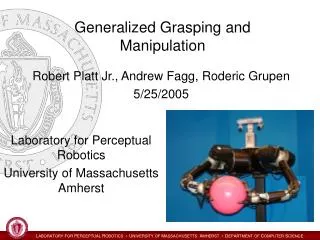
Main Fields of research in grasping • Design of a dexterous end effector (Gripper) • Developing new sensors or sensing techniques oriented for grasping • Methodologies used for intelligent grasping
The gripper Definition: The gripper is the end-effector of the robot which achieves the grasping action • Types of grippers • Simple • Anthropomorphic • Degrees of freedom: is the number of independent variables describing the state of a system
1- Zero degrees of freedom 2- One degree of freedom
3- Two degrees of freedom gripper 3- Multi degrees of freedom gripper
Methodologies and associated sensors Methodologies Incipient Slip Detection Closure Grasp • By detecting local vibration using accelerometer • By detecting secondary slip between rubber and gripper • By studying the change in normal & shear stress curves using ANN Selecting the contact point location that can resist any external force or torque • Heuristic approach • Synthesis approach
Slip Detection: Detecting local vibration using accelerometers
Slip Detection:Detecting slip on secondary surface between rubber and the gripper body
Slip Detection:Studying the change in normal & shear stress curves using ANN
Closure Grasp or force closure • Definition: A grasp is said to be force closure if it is possible to apply forces and torques at the contact points such that any external force and torque can be balanced
Synthesis approach: • Dexterity: Finger configuration • Equilibrium: How hard is the grasp • Stability: How to remain stable with external disturbances • Dynamic behavior: How compliant is the grasp when doing tasks
Heuristic approach • Fuzzy Logic • Artificial Neural networks • Neuro-Fuzzy
Point of research • Using a simple gripper • Covering the fingers with tactile sensor arrays and force sensors • Using master and slave system, successful grasp is achieved • Patterns and signals from tactile and force sensors are used to teach neural network modules • Using visual sensing will be used to give an idea about shape, position and orientation of the object
Point of research • This data will be used to classify the object into one of a number of categories • According to this classification an output may be chosen to select initial force applied on the object • A further refining of the grasp can be made after contact using feedback from sensors
Hypothesis and limitations • The chosen gripper is simple • The examined objects will be fairly simple • 2-D vision sensing will be used