
Innovative Approaches to E-Manufacturing: Remote Quality Control and Automation Integration
E N D
Presentation Transcript
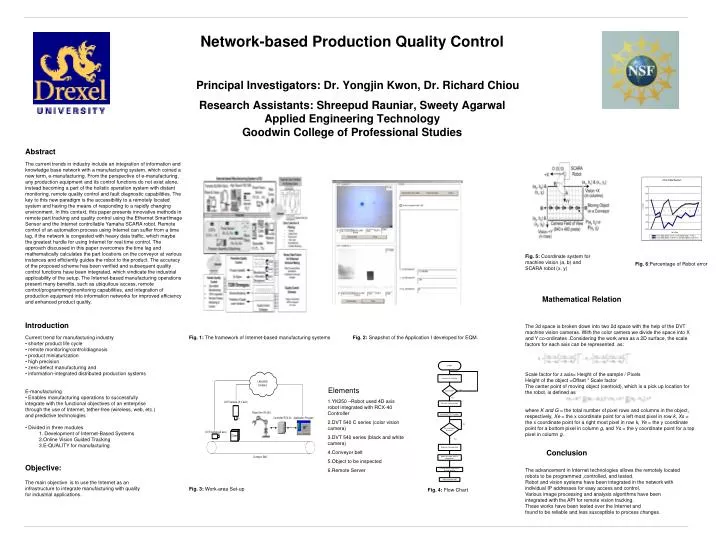
Abstract The current trends in industry include an integration of information and knowledge base network with a manufacturing system, which coined a new term, e-manufacturing. From the perspective of e-manufacturing, any production equipment and its control functions do not exist alone, instead becoming a part of the holistic operation system with distant monitoring, remote quality control and fault diagnostic capabilities. The key to this new paradigm is the accessibility to a remotely located system and having the means of responding to a rapidly changing environment. In this context, this paper presents innovative methods in remote part tracking and quality control using the Ethernet SmartImage Sensor and the Internet controllable Yamaha SCARA robot. Remote control of an automation process using Internet can suffer from a time lag, if the network is congested with heavy data traffic, which maybe the greatest hurdle for using Internet for real time control. The approach discussed in this paper overcomes the time lag and mathematically calculates the part locations on the conveyor at various instances and efficiently guides the robot to the product. The accuracy of the proposed scheme has been verified and subsequent quality control functions have been integrated, which vindicate the industrial applicability of the setup. The Internet-based manufacturing operations present many benefits, such as ubiquitous access, remote control/programming/monitoring capabilities, and integration of production equipment into information networks for improved efficiency and enhanced product quality. Network-based Production Quality ControlPrincipal Investigators: Dr. Yongjin Kwon, Dr. Richard ChiouResearch Assistants: Shreepud Rauniar, Sweety AgarwalApplied Engineering TechnologyGoodwin College of Professional Studies Fig. 5: Coordinate system for machine vision (a, b) and SCARA robot (x, y) Fig. 6:Percentage of Robot error Mathematical Relation Introduction The 3d space is broken down into two 2d space with the help of the DVT machine vision cameras. With the color camera we divide the space into X and Y co-ordinates .Considering the work area as a 2D surface, the scale factors for each axis can be represented as: Scale factor for z axis= Height of the sample / Pixels Height of the object =Offset * Scale factor The center point of moving object (centroid), which is a pick up location for the robot, is defined as where K and G = the total number of pixel rows and columns in the object, respectively, Xe = the x coordinate point for a left most pixel in row k, Xs = the x coordinate point for a right most pixel in row k, Ye = the y coordinate point for a bottom pixel in column g, and Ys = the y coordinate point for a top pixel in column g. • Current trend for manufacturing industry • shorter product life cycle • remote monitoring/control/diagnosis • product miniaturization • high precision • zero-defect manufacturing and • information-integrated distributed production systems • E-manufacturing • Enables manufacturing operations to successfully integrate with the functional objectives of an enterprise through the use of Internet, tether-free (wireless, web, etc.) and predictive technologies • Divided in three modules • 1. Development of Internet-Based Systems • 2.Online Vision Guided Tracking • 3.E-QUALITY for manufacturing Fig. 1: The framework of Internet-based manufacturing systems Fig. 2: Snapshot of the Application I developed for EQM. Elements 1.YK250 –Robot used 4D axis robot integrated with RCX-40 Controller 2.DVT 540 C series (color vision camera) 3.DVT 540 series (black and white camera) 4.Conveyor belt 5.Object to be inspected 6.Remote Server Conclusion Objective: The advancement in Internet technologies allows the remotely located robots to be programmed ,controlled, and tested. Robot and vision systems have been integrated in the network with individual IP addresses for easy access and control. Various image processing and analysis algorithms have been integrated with the API for remote vision tracking. These works have been tested over the Internet and found to be reliable and less susceptible to process changes. Fig. 4: Flow Chart The main objective is to use the Internet as an infrastructure to integrate manufacturing with quality for industrial applications. Fig. 3: Work-area Set-up


















