Download
1 / 119
1.25k likes | 1.75k Vues
ESSENTIAL CALCULUS CH10 Vectors and the geometry of space. In this Chapter:. 10.1 Three-Dimensional Coordinate Systems 10.2 Vectors 10.3 The Dot Product 10.4 The Cross Product 10.5 Equations of Lines and Planes 10.6 Cylinders and Quadric Surfaces

E N D
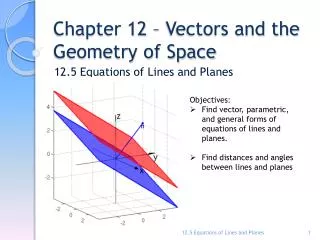
In this Chapter: • 10.1 Three-Dimensional Coordinate Systems • 10.2 Vectors • 10.3 The Dot Product • 10.4 The Cross Product • 10.5 Equations of Lines and Planes • 10.6 Cylinders and Quadric Surfaces • 10.7 Vector Functions and Space Curves • 10.8 Arc Length and Curvature • 10.9 Motion in Space: Velocity and Acceleration Review
DISTANCE FORMULA IN THREE IMENSIONS The distance │P1P2│between the points P1(x1,y1,z1) and P2(x2,y2,z2) is Chapter 10, 10.1, P521
EQUATION OF A SPHERE An equation of a sphere with center C( h, k, l) and radius r is In particular, if the center is the origin O , then an equation of the sphere is Chapter 10, 10.1, P522
The term vector is used by scientists to indicate a quantity (such as displacement or velocity or force) that has both magnitude and direction. A vector is often represented by an arrow or a directed line segment. We denote a vector by printing a letter in boldface (v) or by putting an arrow above the letter (v). Chapter 10, 10.2, P524
displacement vector v , shown in Figure 1, has initial point A (the tail) and terminal point B (the tip) and we indicate this by writing v=AB. Notice that the vector u=CDhas the same length and the same direction as v even though it is in a different position. We say that u and v are equivalent (or equal) and we write u=v. Chapter 10, 10.2, P524
DEFINITION OF VECTOR ADDITION If u and v are vectors positioned so the initial point of v is at the terminal point of u, then the sum u + v is the vector from the initial point of u to the terminal point of v. Chapter 10, 10.2, P525
DEFINITION OF SCALAR MULTIPLICATION If c is a scalar and v is a vector, then the scalar multiple cv is the vector whose length is │c│ times the length of v and whose direction is the same as v if c>0 and is opposite to v if c<0. If c=0 or v=0, then cv=0. Chapter 10, 10.2, P525
Notice that two nonzero vectors are parallel if they are scalar multiples of one another. In particular, the vector –v=(-1)v has the same length as v but points in the opposite direction. We call it the negative of v. Chapter 10, 10.2, P526
By the difference u - v of two vectors we mean u - v= u + (-v) Chapter 10, 10.2, P526
1. Given the points A(x1,y1,z1) and B(x2,y2,z2) , the vector a with representation AB is a=<x2-x1,y2-y1,z2-z1> Chapter 10, 10.2, P527
The length of the two-dimensional vector a=<a1,a2> is The length of the three-dimensional vector a=<a1,a2,a3> is Chapter 10, 10.2, P527
if a=<a1,a2> and b=<b1,b2>, then the sum is a + b=<a1+b1, a2+b2> To add algebraic vectors we add their components. Similarly, to subtract vectors we subtract components. From the similar triangles in Figure 15 we see that the components of ca are ca1 and ca2. So to multiply a vector by a scalar we multiply each component by that scalar. Chapter 10, 10.2, P527
If a=<a1,a2> and b=<b1,b2>, then Similarly, for three-dimensional vectors, Chapter 10, 10.2, P528
We denote by V2 the set of all two-dimensional vectors and by V3 the set of all three-dimensional vectors. More generally, we will later need to consider the set Vn of all n-dimensional vectors. An n-dimensional vector is an ordered n-tuple: Chapter 10, 10.2, P528
PROPERTIES OF VECTORS If a, b, and c are vectors in Vn and c and d are scalars, then • a + b=b + a 2. a + (b - c)=( a + b )+ c • 3. a+0=a 4. a+(-a)=0 • 5. c(a + b)= ca + cb 6. (c + d) a= ca + da • 7. (cd) a=c (da) 8. la=a Chapter 10, 10.2, P528
Three vectors in V3 play a special role. Let i=<1,0,0> j=<0,1,0> k=<0,0,1> These vectors i ,j , and k are called the standard basis vectors. Chapter 10, 10.2, P529
If a=<a1,a2,a3> , then we can write Thus any vector in V3 can be expressed in terms of i, j, and K. Chapter 10, 10.2, P529
In two dimensions, we can write a=<a1,a2>=a1i+a2j Chapter 10, 10.2, P529
1.DEFINITION If a=<a1,a2,a3> and b=<b1,b2,b3> , then the dot product of a and b is the number a‧b given by Chapter 10, 10.3, P533
2. PROPERTIES OF THE DOT PRODUCT If a, b, and c are vectors in V3 and c is a scalar, then • 2. • 4. • 5. Chapter 10, 10.3, P533
3. THEOREM If θ is the angle between the vectors a and b, then Chapter 10, 10.3, P534
6. THEOREM If θ is the angle between the nonzero vectors a and b, then Chapter 10, 10.3, P534
7. Two vectors aand b are orthogonal if and only if a‧b = 0. Chapter 10, 10.3, P535
If S is the foot of the perpendicular from R to the line containing PQ, then the vector with representation PSis called the vector projection of b onto a and is denoted by prjoa b. (You can think of it as a shadow of b). The scalar projection of b onto a (also called the component of b along a) is defined to be numerically the length of the vector projection, which is the number │b│ cosθ, where θ is the angle between a and b. (See Figure 4.) This is denoted by compa b. Chapter 10, 10.3, P535
Scalar projection of b onto a: compa b= Vector projection of b onto a: proja b= Chapter 10, 10.3, P536