Implementation of Search Algorithms: General Search and Queuing Functions
340 likes | 434 Vues
This session delves into the step-by-step implementation of search algorithms like breadth-first and depth-first search in CS-561. Learn how the queuing function determines node expansion order. Topics include uninformed and informed search strategies like A* search and iterative deepening. Explore iterative improvement and hill climbing techniques applied in optimization problems. Examples include the n-queens problem and hill climbing for maximizing the value of the current state. Discover how hill climbing seeks minima or maxima values, addressing local extremums and energy minimization. Dive into the iterative improvement concept in simplified environments.

Implementation of Search Algorithms: General Search and Queuing Functions
E N D
Presentation Transcript
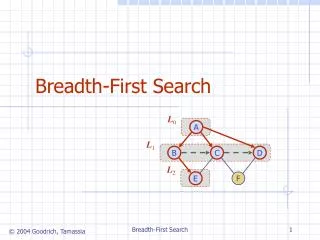
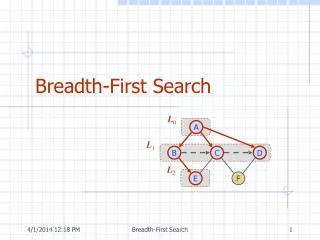
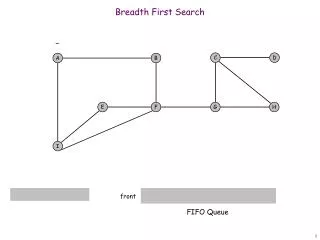
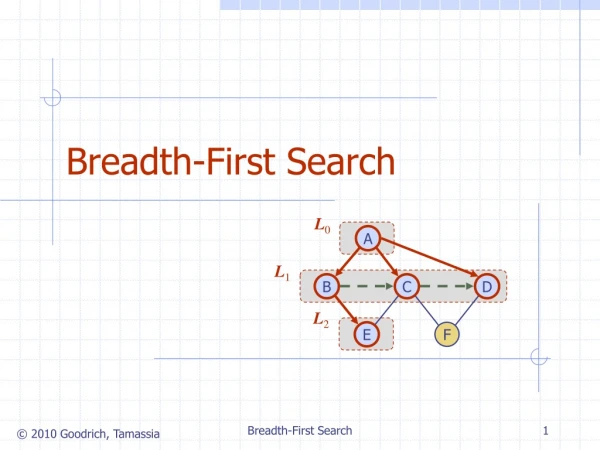
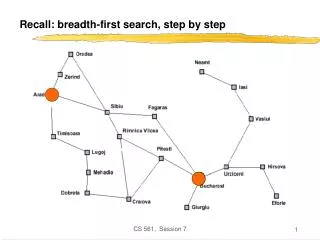
Recall: breadth-first search, step by step CS 561, Session 7
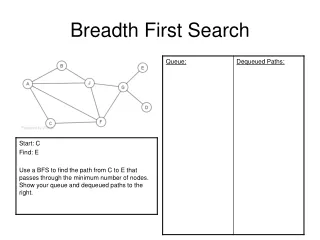
Implementation of search algorithms Function General-Search(problem, Queuing-Fn) returns a solution, or failure nodes make-queue(make-node(initial-state[problem])) loop do if nodes is empty then return failure node Remove-Front(nodes) if Goal-Test[problem] applied to State(node) succeeds then return node nodes Queuing-Fn(nodes, Expand(node, Operators[problem])) end Queuing-Fn(queue, elements) is a queuing function that inserts a set of elements into the queue and determines the order of node expansion. Varieties of the queuing function produce varieties of the search algorithm. CS 561, Session 7
Recall: breath-first search, step by step CS 561, Session 7
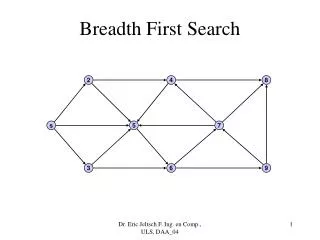
Breadth-first search Node queue: initialization # state depth path cost parent # 1 Arad 0 0 -- CS 561, Session 7
Breadth-first search Node queue: add successors to queue end; empty queue from top # state depth path cost parent # 1 Arad 0 0 -- 2 Zerind 1 1 1 3 Sibiu 1 1 1 4 Timisoara 1 1 1 CS 561, Session 7
Breadth-first search Node queue: add successors to queue end; empty queue from top # state depth path cost parent # 1 Arad 0 0 -- 2 Zerind 1 1 1 3 Sibiu 1 1 1 4 Timisoara 1 1 1 5 Arad 2 2 2 6 Oradea 2 2 2 (get smart: e.g., avoid repeated states like node #5) CS 561, Session 7
Depth-first search CS 561, Session 7
Depth-first search Node queue: initialization # state depth path cost parent # 1 Arad 0 0 -- CS 561, Session 7
Depth-first search Node queue: add successors to queue front; empty queue from top # state depth path cost parent # 2 Zerind 1 1 1 3 Sibiu 1 1 1 4 Timisoara 1 1 1 1 Arad 0 0 -- CS 561, Session 7
Depth-first search Node queue: add successors to queue front; empty queue from top # state depth path cost parent # 5 Arad 2 2 2 6 Oradea 2 2 2 2 Zerind 1 1 1 3 Sibiu 1 1 1 4 Timisoara 1 1 1 1 Arad 0 0 -- CS 561, Session 7
Last time: search strategies Uninformed: Use only information available in the problem formulation • Breadth-first • Uniform-cost • Depth-first • Depth-limited • Iterative deepening Informed: Use heuristics to guide the search • Best first: • Greedy search • A* search CS 561, Session 7
Last time: search strategies Uninformed: Use only information available in the problem formulation • Breadth-first • Uniform-cost • Depth-first • Depth-limited • Iterative deepening Informed: Use heuristics to guide the search • Best first: • Greedy search -- enfileira primeiro os nós que maximizam a “desejabilidade” heurística baseado no custo do nó corrente ao objetivo; • A* search – enfileira primeiro os nós que maximizam a soma dos custos do caminho até o nó mais o custo estimado do nó corrente ao objetivo; CS 561, Session 7
This time • Iterative improvement • Hill climbing • Simulated annealing CS 561, Session 7
Melhoria Iterativa • Em muitos problemas de otimização, o caminho é irrelevante; o estado objetivo por si só é a solução. • Então, o espaço de estados = espaço de configurações “completo”. Objetivo do algoritmo: - achar configuração ótima (ex: TSP), ou, - achar configuração que satisfaça restrições (ex: n-queens) • Em tais casos, pode-se usar algoritmos de melhoria iterativa: manter um estado “corrente” único, e tentar melhorá-lo. CS 561, Session 7
Exemplo de melhoria iterativa: ambiente do aspirador Ambiente simplificado: 2 localizações, cada uma pode ou não conter sujeira e pode ou não conter agente. Objetivo do agente: limpar a sujeira. Se o caminho não importa, não é necessário mante-lo (sabê-lo). CS 561, Session 7
Exemplo de melhoria iterativa: n-queens • objetivo: colocar n rainhas num tabuleiro nxn, sem que hajam duas rainhas na mesma linha, coluna ou diagonal. • Aqui, o estado objetivo é desconhecido inicialmente, mas é especificado por restrições que ele deve satisfazer. CS 561, Session 7
Hill climbing (ou descida/subida do gradiente) • Maximiza “valor” do estado corrente iterativamente, atualizando-o pelo sucessor que possui o maior valor, na medida do possível. CS 561, Session 7
Hill climbing • Nota: minimizar uma função “valorada” v(n) é equivalente a maximizar –v(n), então ambas noções podem ser usadas intercambeadas. • Noção de “extremização”: achar extremo (mínimo ou máximo) de uma função valorada. CS 561, Session 7
Hill climbing • Problema: dependendo do estado inicial, pode parar em extremo (mínimo ou máximo) local. CS 561, Session 7
Minimizando energia • Vamos mudar a formulação do problema um pouco, de maneira que se possa empregar um novo formalismo: - comparar o espaço de estados ao de um sistema físico sujeito a interações naturais, e - comparar a função valorada à energia potencial total (E) do sistema. • Em toda atualização, temos DE 0 • Então, a dinâmica do sistema tende a mover E de encontro ao mínimo. • Estes estados podem ser diferentes — se forem mínimos locais. Minimi- zação global pode não ser garantida. CS 561, Session 7
h Máquinas de Boltzmann A Máquina de Boltzmann de Hinton, Sejnowski, e Ackley (1984) usa Simulated Annealing para fugir de mínimos locais. Para motivar a solução, considere como alguém poderia fazer uma bola navegar ao longo de uma curva para “provavelmente finalizar” no local mais profundo. A idéia é “chacoalhar” a caixa próximo de h de modo que a bola pule, provavelmente, D para C, ou, dependendo da amplitude, de D para B. No final, em algum tempo a bola deverá terminar no vale C. CS 561, Session 7
Idéia básica do Simulated annealing • Do estado corrente tomar um estado sucessor de forma aleatórea; • Se este estado possuir valor melhor que o do estado corrente, então “aceite a transição”, ou seja, faça do estado sucessor o corrente; • Caso contrário, não desistir, aceite a transição com uma dada probabilidade (pequena na medida que o sucessor for ruim). • Algumas vezes, a função valor é não-otimizada com probabilidade diferente de zero. CS 561, Session 7
Analogia: Refrigerar lentamente um líquido • Quanto menor a taxa de variação de T no início, mais gradualmente o líquido se tornará gelo; • Se no início tiver mudanças bruscas em T, algumas regiões gelarão primeiro que outras CS 561, Session 7
Teoria estatística dos gazes, de Boltzmann • Na teoria estatística dos gases, o gás é descrito pela probabilidade de ele se encontar em estados diferentes e não por uma dinâmica determinística. • No século 19, o físico Ludwig Boltzmann desenvolveu uma teoria que incluiu uma distribuição probabilística da temperatura, isto é, regiões do gás pequenas, vizinhas, possuem a mesma energia cinética. • A idéia de Hinton, Sejnowski e Ackley’s é que esta distribuição pode ser tb usada para descrever interações neurais, onde temperatura a baixar T é atualizada por um pequeno sinal de ruído: o análogo neural do movimento aleatório termal de moléculas. Os resultados se aplicam a otimização usando redes neurais, mas a idéia é mais geral. CS 561, Session 7
Distribuição de Boltzmann • Em equilíbrio térmico a uma temperatura T, a distribuição de Boltzmann produz a probabilidade relativa de que o sistema ocupará o estado A versus o estado B como: • onde E(A) e E(B) são as energias associadas com os estados A e B. CS 561, Session 7
Simulated annealing Kirkpatrick et al. 1983: • Simulated annealing é um método geral para produzir um provável escape de mínimos locais permitindo saltos com energias mais altas. • A analogia aqui é com o processo de recozimento usado por um artesão para forjar uma espada de uma liga. • Aquece o metal, a seguir refrigera-o lentamente enquanto martela a lâmina para obter a forma desejada. • Se refrigerar a lâmina muito rapidamente, o metal formará pedaços com composição diferente; • Se o metal for refrigerado lentamente enquanto dando forma, os metais constituintes formarão uma liga uniforme. CS 561, Session 7
Simulated annealing na prática • determina T inicial (temperatura) • otimiza para o dado T • abaixa T (see Geman & Geman, 1984) • repete CS 561, Session 7
Simulated annealing na prática • determina T inicial (temperatura) • otimiza para o dado T • abaixa T (see Geman & Geman, 1984) • repete • Geman & Geman (1984): se T é abaixado lentamente (com respeito ao número de iterações usadas para otimizar a uma dada temperatura T), garante-se que o simulated annealing acha o mínimo global. • Caveat: este algoritmo pode não ter fim. O decrescimento em T (Geman & Geman) é da ordem de 1/log do número de iterações, então, T poderá nunca ser zero). Isto pode levar a um tempo infinito para atingir o mínimo global. CS 561, Session 7
Algoritmo para o Simulated annealing • Idéia: Escapar extremo local permitindo “movimentos ruins”, mas gradualmente decrementando o seu tamanho e freqüência. Nota: objetivo aqui é maximizar E. - CS 561, Session 7
Algoritmo para o Simulated annealing • Idéia: Escapar extremo local permitindo “movimentos ruins”, mas gradualmente decrementando o seu tamanho e freqüência. Algoritmo visando minimizar E. - < - CS 561, Session 7
Simulated annealing: casos limites • Distribuição de Boltzmann: aceita “movimento ruim” com E<0 (objetivo é maximizar E) com probabilidade P(E) = exp(E/T) • P/ T grande : E < 0 E/T < 0 and very small exp(E/T) close to 1 accept bad move with high probability • P/ T pequeno (0): E < 0 E/T < 0 and very large exp(E/T) close to 0 accept bad move with low probability CS 561, Session 7
Simulated annealing: casos limites • Distribuição de Boltzmann: aceita “movimento ruim” com E<0 (objetivo é maximizar E) com probabilidade P(E) = exp(E/T) • If T is large: E < 0 E/T < 0 and very small exp(E/T) close to 1 accept bad move with high probability • If T is near 0: E < 0 E/T < 0 and very large exp(E/T) close to 0 accept bad move with low probability Random walk Deterministic down-hill CS 561, Session 7
Sumário • Best-first search = general search, onde os nós de custo mínimo (de acôrdo com alguma medida) são expandidos primeiro. • Greedy search = best-first com o custo estimado para alcançar o objetivo sendo uma medida heurística. - Geralmente mais rápido que uninformed search - não ótimo - não completo. • A* search = best-first com medida = custo efetivo até o nó (desde origem) + custo estimado até o objetivo. - combina vantagens das estratégias uniform-cost e greedy - completo, ótimo e otimamente eficiente - complexidade de memória ainda exponencial CS 561, Session 7
Sumário • Complexidade de tempo dos algoritmos heurísticos dependem da qualidade da função heurística. Boas heurísticas podem algumas vezes serem construídas examinando-se a definição do problema ou generalizando de experiências com a classe de problemas. • Algoritmos de melhoria iterativa mantém apenas um único estado em memória. • Podem parar em extremos locais; simulated annealing provê uma maneira de escapar de extremos locais, e é completo e ótimo, se for aplicado um resfriamento suficientemente lento. CS 561, Session 7