Download
1 / 15
150 likes | 318 Vues
Identification of RFID Tags in Framed-Slotted ALOHA with Tag Estimation and Binary Splitting. 基于标签估计和二进制分裂帧时隙 ALOHA 算法的 RFID 标签识别. 摘要 在 RFID 系统里 , 标签碰撞问题的解决对快速标签识别至关重要 . 我们提出一个准确的标签估计方法和一个有效的标签反碰撞协议 . 该算法读取标签所需要的时隙数比二进制树形算法和动态帧时隙算法少 10-20%. 提出的算法对不准确的标签估计值有很好的容忍能力。

E N D
Identification of RFID Tags in Framed-Slotted ALOHA with Tag Estimation and Binary Splitting 基于标签估计和二进制分裂帧时隙ALOHA算法的RFID标签识别
摘要 • 在RFID系统里,标签碰撞问题的解决对快速标签识别至关重要.我们提出一个准确的标签估计方法和一个有效的标签反碰撞协议.该算法读取标签所需要的时隙数比二进制树形算法和动态帧时隙算法少10-20%.提出的算法对不准确的标签估计值有很好的容忍能力。 • Keywords-anti-collision, collision resolution, RFID, tag estimation, tag identification.
1.引言 • 标签反碰撞协议分为为基于ALOHA和基于树形的.基于ALOHA的算法有ALOHA算法、时隙ALOHA算法和帧时隙ALOHA算法。参考文献[5][6]中提出了基于标签估计的动态帧时隙ALOHA算法,但当标签数目比帧长度要大得多时,阅读器不能准确地估计标签的数目。而且就算帧长度是最佳的,还是会浪费那些空闲的时隙。基于树形算法是把碰撞的标签随机分为两组。在参考文献[4]里提出了一个算法,通过二进制树形协议决定传输的顺序,然后在一下个识别周期使用这个传输顺序。二进制树形协议使用的时隙比较多,因为它在识别的早期会发生很多碰撞。 • 我们提出一个新反碰撞算法——带有标签估计和二进制分裂的帧时隙ALOHA算法(EBFSA),通过减少不必要的空闲时隙和碰撞使标签识别时间最小化。本文结构安排如下:第二章解释帧时隙ALOHA算法,第三章解释二进制树形算法,第四章提出新算法,第五章仿真,第六章总结。
2.帧时隙ALOHA反碰撞算法 • A传统帧时隙ALOHA算法 • B动态帧时隙ALOHA算法 • 3.二进制树形反碰撞算法 • A二进制树形算法
B自适应二进制分裂算法(ABS) • 自适应二进制分裂算法是一个增强的二进制树形算法。在二进制树形算法里当标签的计数值为0时,标签发送出它的ID;而自适应二进制分裂算法里有一个进程计数器,当标签的计数值与进程计数器相等时,这些标签就把它的ID发送到阅读器。在识别进程之后,标签的计数器表示它的传输顺序。标签不重启计数器,而在下一个识别周期里使用这个计数值。自适应二进制分裂算法适用于多个阅读器多次识别同一区域的标签的情况下。
4。带有标签估计和二进制分裂的帧时隙ALOHA算法(EBFSA)4。带有标签估计和二进制分裂的帧时隙ALOHA算法(EBFSA) • 在参考文献[5]里,基于标签估计的动态帧时隙ALOHA算法用碰撞几率来估计标签数目,然后决定下一周期的帧长度(L)。当帧长度与标签数相等时,帧时隙ALOHA算法的识别性能最佳。因此,标签数目估计对动态帧时隙ALOHA来说是至关重要的。然而当帧长度比实际标签数要小得多时,标签数目的估计值和帧长度就变得不正确。因此原始帧长度必须根据情况而改变。在二进制树形算法里,标签估计不是必需的,全部标签在第一周期里同时把它们的ID发送出去,然后不管标签的多少只随机分为两组,这两组也重复这样的操作。因此二进制树形算法在识别进程的早期会发生很多碰撞。因此重点是准确地估计出标签数目。
我们提出的带有标签估计和二进制分裂的帧时隙ALOHA算法(EBFSA)包含两个阶段:标签估计阶段和识别阶段,如图4所示。在标签估计阶段阅读器估计标签数目,在识别阶段标签在估计的最佳帧长度是发出它们的ID。我们提出的带有标签估计和二进制分裂的帧时隙ALOHA算法(EBFSA)包含两个阶段:标签估计阶段和识别阶段,如图4所示。在标签估计阶段阅读器估计标签数目,在识别阶段标签在估计的最佳帧长度是发出它们的ID。
A估计阶段 • 在估计阶段标签用帧时隙ALOHA算法进行传输,阅读器按式(1)计算标签碰撞几率。 • 其中n是标签数目,L是当前帧长度,Pcoll、Pidle 和 Psucc分别表示时隙碰撞几率、空闲几率和成功几率。当计算出的碰撞几率较高时,估计出的标签数目就变得不准确。
图3为n与Pcoll的关系。当碰撞几率高时,估计的标签数目比比碰撞几率的变化要大得多。因此在估计阶段新算法用固定的帧长度Lest来估计标签数目。假如碰撞几率超过上限值,阅读器就按因数fd减少响应的标签,直到碰撞几率低于上限值。所以提出的估计方法可以不依赖于初始帧长度准确地估计出标签数目。图3为n与Pcoll的关系。当碰撞几率高时,估计的标签数目比比碰撞几率的变化要大得多。因此在估计阶段新算法用固定的帧长度Lest来估计标签数目。假如碰撞几率超过上限值,阅读器就按因数fd减少响应的标签,直到碰撞几率低于上限值。所以提出的估计方法可以不依赖于初始帧长度准确地估计出标签数目。
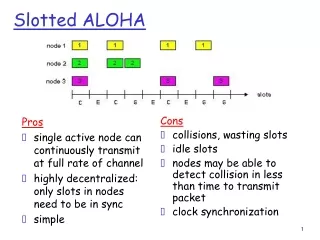
B识别阶段 • 每个标签在最佳帧长度L里随机选择一个计数值,然后在每个时隙里将它们的计数值减1,当计数值为0时,标签就发出它们的ID。当碰撞发生时,执行二进制树形算法,碰撞的标签随机选择计数值0或1,其它标签计数值加1。以图2为例,标签1、3、4在第三个时隙发生碰撞,它们随机选择计数值0或1,而标签5的计数值加1,标签4随机选择到计数值0,它在第四个时隙里成功发送出ID;而标签1、3因为选择了计数值1,所以在第五个时隙里再次发生碰撞,标签1选择计数值0,标签3选择计数值1,所以标签1在第6个时隙成功识别,标签3在第7个时隙成功识别,而标签5在第8时隙计数值为0,也成功识别。
5。仿真结果 • 我们通过仿真比较动态帧时隙ALOHA算法(DFSA)、二进制树形算法和(EBFSA)的性能。DFSA的初始帧长度设为能估计n个标签的最小帧长度(0.2xn)。在EBFSA里设Lest=64, Pcoll,th=0.7,fd=5,当n=1000时,估计阶段的重复次数为3。图5为当n=1000时用EBFSA算法所需的时隙数。当帧长度大概为1000时,EBFSA算法的性能最佳。
但当帧长度不准确时如500~1500,EBFSA算法的性能也可以接受。图6、图8为这三个算法所用的总时隙数。EBFSA用的时隙最少,分别比DFSA和二进制树形算法少用10%和20%。当标签估计准确时,DFSA的性能比二进制算法好,而当标签估计不准确时,DFSA需要的时隙数急剧增加。我们提出的EBFSA算法对不准确的标签估计值有很好的容忍能力。当不准确的标签数为0.5n和1.5n时,该算法时隙数仅增加了3-5%,而传统帧时隙算法所需的时隙会随着标签数的增大呈指数增大。但当帧长度不准确时如500~1500,EBFSA算法的性能也可以接受。图6、图8为这三个算法所用的总时隙数。EBFSA用的时隙最少,分别比DFSA和二进制树形算法少用10%和20%。当标签估计准确时,DFSA的性能比二进制算法好,而当标签估计不准确时,DFSA需要的时隙数急剧增加。我们提出的EBFSA算法对不准确的标签估计值有很好的容忍能力。当不准确的标签数为0.5n和1.5n时,该算法时隙数仅增加了3-5%,而传统帧时隙算法所需的时隙会随着标签数的增大呈指数增大。
图7、图9为这三种算法里的碰撞时隙数。在二进制树形算法里因为早期大量的碰撞,总碰撞数也很大,DFSA的碰撞最少,但即使帧长度最佳,还是会出现很多空闲的时隙,这限制了DFSA的性能。图7、图9为这三种算法里的碰撞时隙数。在二进制树形算法里因为早期大量的碰撞,总碰撞数也很大,DFSA的碰撞最少,但即使帧长度最佳,还是会出现很多空闲的时隙,这限制了DFSA的性能。
6。结论 • 我们提出一个准确可控的标签、帧长度估计方法,和一个有效反碰撞算法。该算法可以在不清楚初始帧长度的情况下准确地估计出标签数目。仿真结果表明我们提出的EBFSA算法消耗的时隙比DFSA算法和二进制树形算法少。另外EBFSA比DFSA对不准确标签估计值具备更好的的容忍能力。