Download
1 / 16
160 likes | 384 Vues
Automatyka. Wykład 20 Regulacja dyskretna. Rozwój i powszechność zastosowań regulacji cyfrowej można podzielić na okresy: - okres pionierski ok.1955r., - okres bezpośredniego sterowania cyfrowego ok. 1962r., - okres minikomputerów ok. 1972r.,

E N D
Automatyka Wykład 20 Regulacja dyskretna.
Rozwój i powszechność zastosowań regulacji cyfrowej można podzielić na okresy: - okres pionierski ok.1955r., - okres bezpośredniego sterowania cyfrowego ok. 1962r., - okres minikomputerów ok. 1972r., - okres mikrokomputerów oraz powszechne zastosowanie sterowania cyfrowego ok. 1980r., - sterowanie rozproszone ok. 1990r. (distributed control).
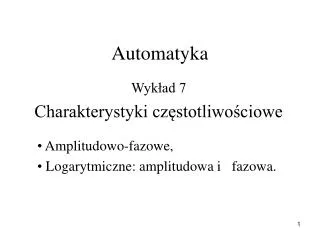
w(t) e(t) u(t) y(t) Obiekt regulacji Regulator –y Sygnały dyskretne W układach regulacji analogowej (ciągłej) sygnał sterujący u(t) obiektem jestsygnałem analogowym opisanym funkcją ciągłą, która może przyjmować dowolną wartość z ciągłego przedziału (nieskończonego lub ograniczonego zakresem zmienności). W układach regulacji dyskretnej sygnał sterujący u(t) jest sygnałem dyskretnym, który nie jest funkcją zdefiniowaną dla ciągłego przedziału argumentów, lecz jest ciągiem liczbowym. Każda wartość ciągu nazywa się próbką (ang. sample). Rys. 1. Ogólny schemat blokowy układu regulacji automatycznej
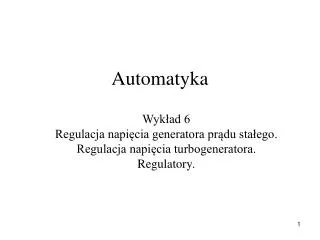
u 3Tp 4Tp Tp 2Tp 0 t • Rozróżnia się trzy rodzaje sygnałów dyskretnych: • sygnały dyskretne w czasie ( sygnały spróbkowane), • sygnały dyskretne w poziomie ( sygnały skwantowane), • sygnały dyskretne w czasie i w poziomie (sygnały cyfrowe). Sygnał dyskretny w czasie powstaje w procesie próbkowania sygnału ciągłego. Próbkowanie (dyskretyzacja, kwantowanie w czasie) oznacza proces tworzenia sygnału dyskretnego, reprezentującego sygnał ciągły za pomocą ciągu wartości nazywanych próbkami. W realizacji praktycznej próbki są iloczynem mierzonych w równych odstępach czasu wartości chwilowych sygnału ciągłego oraz powtarzających się impulsów najczęściej prostokątnych (rys. 2). Rys. 2.
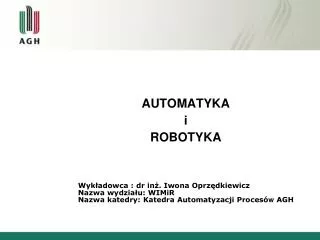
u u u u a) a) b) b) u(0) u(0) u(Tp) u(Tp) u(2Tp) u(2Tp) u(3Tp) u(3Tp) t t 0 0 0 0 t t 3Tp 3Tp 3Tp 3Tp 2Tp 2Tp Tp Tp 2Tp 2Tp Tp Tp Proces regulacji, w którym sygnał sterujący u(t) ma postać impulsów (rys. 3a) powstałych w procesie próbkowania sygnału ciągłego nazywa się regulacją impulsową (regulacją dyskretną w czasie). Jeżeli amplituda impulsów sterujących jest równa lub proporcjonalna do wartości ciągłego sygnału błędu regulacji, to układ regulacji nazywa się układem regulacji impulsowej z modulacją amplitudy impulsów (ang. amplitude modulation) (rys. 3a). W praktyce spotyka się najczęściej układy regulacji impulsowej z modulacją szerokości impulsów (ang. pulse width modulation), w których amplituda impulsów sterujących u(t) jest stała wewnątrz okresu impulsowania, a ich szerokość jest proporcjonalna do wartości błędu regulacji e(t) w chwilach impulsowania (rys. 3b). Regulacja impulsowa z modulacją szerokości impulsów sterujących jest stosowana między innymi w przetwornicach impulsowych napięcia, stanowiących zasadniczą część zasilacza impulsowego. Rys. 3. Impulsy sterujące: z modulacją amplitudy impulsów (a), z modulacją szerokości impulsów (b)
u poziomy kwantowania 0 t Sygnał dyskretny w poziomie powstaje w procesie kwantowania sygnału ciągłego i przyjmuje dwie lub więcej wartości (rys. 4). Sygnał dyskretny w poziomie nazywa się również sygnałem skwantowanym. Proces regulacji, w którym sygnał sterujący jest sygnałem skwantowanym nazywa się regulacją dyskretną w poziomie. Przykładem regulacji dyskretnej w poziomie jest regulacja dwupołożeniowa (dwuwartościowa, przekaźnikowa). Sygnał sterujący u(t) w układzie regulacji dwupołożeniowej przyjmuje tylko dwie wartości (dwa poziomy kwantowania). Regulator dwupołożeniowy jest regulatorem nieliniowym. Rys.4. Sygnał dyskretny w poziomie (skwantowany)
e(t) Poziomy kwantowania 0 Tp 2Tp 3Tp 4Tp 5Tp 6Tp t Sygnał spróbkowany i skwantowany, nazywany również sygnałem cyfrowym, jest to sygnał, którego dziedzina i zbiór wartości są dyskretne (rys. 5). Rys. 5. Skwantowany i spróbkowany błąd regulacji
Układ regulacji, w którym sygnał nastawiający uzyskany z ciągu sterującego reprezentującego sygnał cyfrowy ma postać sygnału schodkowego (rys. 6) nazywa się układemregulacji cyfrowej. Rys. 6. Schodkowy sygnał sterujący w układzie regulacji cyfrowej
Zegar Sygnał schodkowy sygnał analogowy u(nTp) e(nTp) u(t) w0 e(t) Obiekt regulacji A/C C/A -y Regulator cyfrowy Cyfrowy algorytm regulacji Układ regulacji cyfrowej Układ regulacji cyfrowej składa się z regulatora cyfrowego, zawierającego przetwornik analogowo-cyfrowy, jednostkę liczącą i przetwornik cyfrowo-analogowy oraz obiektu regulacji (rys. 7.). Rys. 7. Schemat blokowy układu regulacji cyfrowej Regulator cyfrowy przetwarza spróbkowany i skwantowany sygnał błędu regulacji e(nTp) w ciąg sterujący u(nTp). Obliczanie wartości ciągu sterującego u(nTp) odbywa się zgodnie z algorytmem określającym działanie regulatora (algorytm P, PI, PD, PID). Ograniczona liczba bitów w strukturze regulatora cyfrowego, na których zapisywane są zakodowane wartości błędu regulacji w chwilach próbkowania, oznacza ograniczoną liczbę poziomów określających możliwe wartości ciągu sterującego. Przetwornik C/A przetwarza ciąg sterujący u(nTp) w schodkowy sygnał sterujący.
Przekształcenie Z Przekształceniem Z funkcji dyskretnej f(nTp) nazywa się przekształcenie określone wzorem przyporządkowujące funkcji dyskretnej f(nTp) funkcję zmiennej zespolonej F(z). Funkcję f(nTp) nazywa się oryginałem, a funkcję F(z) – transformatą Z funkcji f(nTp). Przekształcenie Z (przekształcenie Laurenta) oznacza się za pomocą operatora Z następująco: Przekształcenie Przekształcenie oznacza odwrotne przekształcenie Z.
Podstawowe własności przekształcenia Z. Dyskretny skok jednostkowy: Transformata Z dyskretnego skoku jednostkowego: Dyskretna funkcja wykładnicza Transformata Z funkcji wykładniczej:
Transformaty Z funkcji przesuniętych. Transformata Z funkcji dyskretnej przesuniętej w lewo o k okresów próbkowania względem funkcji W szczególnym przypadku, gdy Transformata Z funkcji dyskretnej przesuniętej w prawo: W szcególności, gdy
Transformaty Z różnic funkcji dyskretnych Różnica pierwszego rzędu: Transformata Z różnicy pierwszego rzędu: Dla f(0) = 0 Różnica wsteczna pierwszego rzędu: Transformata Z różnicy wstecznej pierwszego rzędu: Gdy f(-1) = 0
Różnica drugiego rzędu: Transformata Z różnicy drugiego rzędu przy zerowych warunkach początkowych: Różnica wsteczna drugiego rzędu: Transformata Z różnicy wstecznej drugiego rzędu przy zerowych warunkach początkowych: Transformaty Z różnic k-tego rzędu przy zerowych warunkach początkowych:
Transformata Z sumy funkcji dyskretnej. Suma funkcji dyskretnej Transformata Z sumy funkcji dyskretnej. Transformata Zk – krotnej sumy funkcji dyskretnej.
Twierdzenia o wartościach granicznych. Twierdzenie o wartości początkowej funkcji dyskretnej: Twierdzenie o wartości końcowej funkcji dyskretnej: