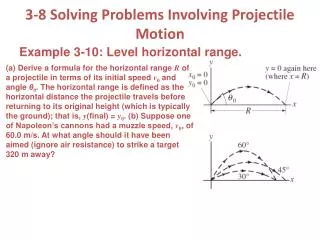
Solving Inverse Design Problems Involving Radiant Enclosures through Gradient-Based Optimization
Solving Inverse Design Problems Involving Radiant Enclosures through Gradient-Based Optimization. K. J. Daun, J. R. Howell, and D. P. Morton Department of Mechanical Engineering The University of Texas at Austin. Radiant Enclosure Design Problems.

Solving Inverse Design Problems Involving Radiant Enclosures through Gradient-Based Optimization
E N D
Presentation Transcript
Solving Inverse Design Problems Involving Radiant Enclosures through Gradient-Based Optimization K. J. Daun, J. R. Howell, and D. P. Morton Department of Mechanical Engineering The University of Texas at Austin
Radiant Enclosure Design Problems • Radiant enclosure design problems are encountered in diverse industrial settings • Examples: • Paint drying in the automotive industry • Baking ovens in the food industry • RTP of semiconductor wafers • Optimal geometry of solar collector-concentrators
General Form of the Design Problem Heater Surface qs = ? qs = ? • Enclosure contains a heater surface and a design surface • Goal is to find the enclosure geometry and heater settings that produces the desired qs and T over the design surface • In order for the problem to be well-posed, only one BC can be specified on each surface! • Can be solved using forward, inverse, or optimization design methodologies qs = ? qs = ? qs = ? qs = ? Design Surface qsDS, TDS are known
Forward Design Methodology • Either TDS or qsDS is specified over each surface • Assume TDSis specified over the design surface • The designer • Guesses heater settings and enclosure geometry • Calculates qsover the design surface • Adjusts design and repeats analysis if necessary • Requires many iterations, and the final solution quality is limited
Inverse Design Methodology • Both TDSand qsDS are specified over the design surface, while the heater settings are unspecified • The inverse design problem is in its explicit form, which is ill-posed • The resulting set of ill-conditioned equations, Ax = b, must be solved using regularization methods • Finds a solution in few iterations, but it is often non-physical • This method is only applicable to certain types of enclosure design problems
Optimization Design Methodology • TDS is specified over the design surface • Define an objective function, F(F), and design parameters, F, that control enclosure geometry and heater settings • Optimal design is found by minimizing F(F), usually through gradient-based minimization • Much more efficient than forward “trial-and-error” method • Easy to implement design constraints by restricting the domain of F
Gradient-Based Minimization • Objective function local minimum is found iteratively • At the kth step: • Check if Fk = F*, usually by checking if |F(Fk)| < ecrit • Choose search direction, pk • Choose step size, ak,usually by minimizing f(ak) = F(Fk+akpk) • Take a step, Fk+1 = Fk + akpk
Gradient-Based Minimization • Search direction is chosen based on 1st and 2nd-order curvature at F(Fk): • Search direction choices:
Classes of Enclosure Design Problems Heater Surface q1= ? q2= ? q3= ? q4= ? q5= ? q1 = ? q2 = ? q3 = ? q4 = ? Design Surface T = Tspec, q = qspec Design Surface T = Tspec, qs = qspec Heater Surface q1= ? q4(t)= ? q1(t)= ? q2(t)= ? q3(t)= ? q5(t)= ? q2= ? Heater Surface q3= ? q4= ? q5= ? V Design Surface T = Tspec, q = qspec Design Surface T(t) = Tspec, q(t) = qspec
Inverse Boundary Condition Design Heater Surface qs= ? qs= ? qs= ? qs= ? qs= ? Design Surface T = Tspec, qs = qspec • Goal is to find heat flux distribution over the heater surface • Enclosure geometry is fixed • Solved using both inverse and optimization design methodologies • Inverse design methodologies by Oguma and Howell (1995), Harutunian et al. (1995) • Optimization design methodology by Daun et al. (2003)
Governing Radiosity Equations = + Radiosity Emitted Radiation Reflected Incident Radiation = + Incoming Energy Outgoing Energy
Solution of Governing Equations • Calculating F(F) and 2F(F) requires 1st- and 2nd-order heat flux sensitivity, e.g. • Radiosity sensitivities are solved by post-processing the radiosity solution • Solve Ax = b, xi = qoi(F) • Solve Ax = b, xi = qoi(F)/Fp • Solve Ax = b, xi = 2qoi(F)/FpFq • Heat flux sensitivities are found from radiosity sensitivities
Example Problem: Inverse BC Design F9 F10 F11 F12 F12 F11 F10 F9 F8 F8 F7 F7 Heater Surface e = 0.9 F6 F6 F5 F5 F4 F4 Design Surface qstarget = 2 W/m2 Eb = 1 W/m2 e = 0.5 F3 F3 F2 F2 F1 F1 qs = 0W/m2 qs = 0W/m2
Example Problem: Inverse BC Design 12 sT4(u) [W/m2] 10 8 F9 F9 6 F1 F1 4 F4 F4 F3 F3 2 0 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 u
Example Problem: Inverse BC Design 2 sT4(u) [W/m2] (specified) 1.5 1 0.5 0 -0.5 -1 qs(u, F*) [W/m2] -1.5 -2 -2.5 -3 0.95 0.65 0.7 0.75 0.8 0.85 0.9 0.95 u
Optimization of Transient Problems Heater Surface q5(t)= ? q4(t)= ? q1(t)= ? q2(t)= ? q3(t)= ? V Design Surface T(t) = Tspec(t), q(t) = qspec(t) • Solved using: • Gradient-based optimization (Fedorov et al., 1998) • Inverse design methodology (Ertürk et al., 2001) • Nonlinear controls with regularization (Gwak and Masada, 2002)
Governing Equations d(u) + = - Stored Energy Incoming Energy Outgoing Energy • Enclosure surface discretized into N elements, and time domain discretized into Nt time steps • Results in a non-linear system of equations that must be solved at each time step
Transient Optimization • Objective function is defined as • Heater settings are controlled by cubic splines, where t = t/tmax. • Objective function sensitivities found analytically, through direct differentiation
Example Problem: Transient Optimization 1 2 3 4 5 6 7 8 Heater surface T1 = 300 K e1= 1 T2 = 1000 K e2 = 1 Design surface Refractory surface V t =0 t =1
Example Problem: Transient Optimization 1 3 4 5 6 7 8 2 1 0.9 0.8 0.7 0.6 qs(F)/sT24 0.5 0.4 0.3 0.2 0.1 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 t
Example Problem: Transient Optimization 1.2 x = 0 x = 1 1 Design Surface x = 1 0.8 Target T(F, t)/Ts 0.6 x = 0 0.4 0.2 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 t
Geometric Optimization F2 F1 qs(F3) qs(F4) Heater Surface qs(F5) qs(F6) qs(F7) Design Surface T = Tspec, q = qspec • Both heater settings and geometry can be designed • Only optimization methods have been used • Deterministic optimization for diffuse-gray enclosures (infinitesimal-area method) • Stochastic optimization for enclosures with specular surfaces (Monte Carlo method)
Enclosures Containing Specular Surfaces ` • The exchange factor, Fji, is estimated using Monte Carlo analysis: • The uncertainty in Fji induces a random error in qs(F) and F(F) Energy in from other sources Energy leaving by emission Energy in from surrounding surfaces – = = -
Stochastic Optimization • Uses Kiefer-Wolfowitz scheme based on steepest-descent, used when an unbiased estimate of F(F) is unavailable • At the kth iteration, • Check if Fk = F* • Set • Set ak = a0/ka, 0 a 1 • Fk+1 = Fk + akpk • The gradient is estimated by central finite difference, with
Example Problem: Geometric Optimization F2 Specular Surface qs3 = 0 W/m2 r3 = 1 F1 Specular Surface qs2 = 0 W/m2 r2 = 1 Heater Surface qs1 = 1 W/m2 e1 = 1 u Design Surface Eb4 = 0 W/m2, qstarget = -1 W/m2, e4 = 1
Example Problem: Geometric Optimization F2 F1 F2 F1 Initial Enclosure Geometry Minimization Path Optimal Enclosure Geometry
Example Problem: Geometric Optimization qs(u, F0) (initial) qs(u, F*) (optimal)
Conclusions • Optimization is used to design many types of radiant enclosures • Solves the inverse design problem implicitly, through iteration • More efficient than the forward design method, and usually produces better solutions • More straightforward than inverse design (regularization) method, and easier to implement design constraints