Download
1 / 13
140 likes | 363 Vues
Externe Datenstruktur lineare Liste. Agenda. Das Externspeichermodell Lineare geordnete Listen Eine „naive“ Implementierung Eine „bessere“ Implementierung Aufbau Operationen Optimierungsmöglichkeiten Quellen. Das Externspeichermodell. Externspeicher. Hauptspeicher, Main Memory. CPU.

E N D
Agenda • Das Externspeichermodell • Lineare geordnete Listen • Eine „naive“ Implementierung • Eine „bessere“ Implementierung • Aufbau • Operationen • Optimierungsmöglichkeiten • Quellen
Das Externspeichermodell Externspeicher Hauptspeicher, Main Memory CPU B1 B2 Bn B5 B6 1 I/O
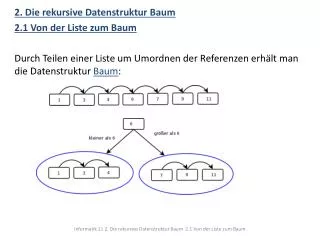
Lineare geordnete Listen aufsteigend sortiert Array • Operationen: • Search (x) Suchen eines Elementes innerhalb der Liste mit dem Schlüssel ‚x‘ • Insert (x)Fügt ein Element mit dem Schlüssel ‚x‘ in die Liste • Delete (x)Entfernt ein Element mit dem Schlüssel ‚x‘ aus die Liste Anfang einfach verlinkte Liste 2 5 11 50 99 Anfang doppel verlinkte Liste 26 27 55 78 89 Anfang Ende
„Naive“ Implementierung 1/2 Search(x): Es wird über jedes Element in den Blöcken der Liste traversiert, auf der Suche nach dem Element mit dem Schlüssel ‚x‘. ges. N/B I/Os Insert(x): Jeder Block wird einzeln durchlaufen, auf der Suche nach einem der Ordnung entsprechenden Platz. N/B I/Os Falls der passende Block einen verfügbaren Platz besitzt, so wird das Element mit dem Schlüssel ‚x‘ eingefügt. 1 I/O Falls der passende Block keinen verfügbaren Platz hat, so wird dieser in zwei Blöcke zu je B/2 Elemente aufgespalten. Beide Blöcke werden anschließend zurückgeschrieben. 2 I/O ges. N/B+3 I/Os
„Naive“ Implementierung 2/2 Delete(x): Es wird über jedes Element in den Blöcken der Liste traversiert, auf der Suche nach dem Element mit dem Schlüssel ‚x‘ (Search(x)). N/B I/Os Das gesuchte Element wird aus dem Block entfernt und der betreffende Block wird zurückgeschrieben. 1 I/O ges. N/B+1 I/Os Die „naive“ Implementierung lässt sich optimieren…
„Bessere“ Implementierung - Aufbau 1/2 Indexarray: Beinhaltet Schlüssel des ersten Elements jedes Blocks (Key x), den dazugehörigen Zeiger dieses Blocks im externen Speicher (ptr y) und die Anzahl der Elemente innerhalb des Blocks (n). Länge des Arrays: N/B interner Speicher …… Key 1 ptr 1 5 Key x ptr y 3 B1 Bn …… Blockarray: Ein Block wird repräsentiert als Array der Länge: B
„Bessere“ Implementierung - Aufbau 2/2 Blockplätze: Zum Mischen und Aufspalten der Blöcke bei Bedarf. Entspricht der Größe von: 2B interner Speicher Optimierungsziel: Zu jeder Zeit sollten sich in einem Paar aufeinander folgender Blöcke2/3 B an zusammengehörigenElementen befinden. (Minimierung der Blockanzahl) Beispiel Blockgröße: B = 5 |B2| + |B3| > 2/3 B |Bx| = #Elemente |B1| + |B2| > 2/3 B B1 B2 B3 Bn …
„Bessere“ Implementierung – Operationen 1/3 • Search(x): • Führe binäre Suche auf dem Indexarray durch. Da alle ersten Schlüssel im Indexarray gespeichert sind, kann der gesuchte Block anhand der Schlüssel seiner Nachbarblöcke gefunden werden. • Führe eine binäre Suche auf das Blockarray durch. Search(5) 1 I/O Search(5) ges. 1 I/O 1 ptr B1 3 7 ptr B2 1 8 ptr B3 3 B1 B2 B3 1 2 5 7 8 10 13
„Bessere“ Implementierung – Operationen 2/3 Insert(x): Passender Block kann für das Einfügen analog zur Search(x)-Operation gesucht werden. 1 I/O Fall 1 – Gesuchter Block bietet Platz zum Einfügen Füge das Element ein und verschiebe wenn nötig die nachfolgenden Elemente dieses Blockes. * 2 I/Os • Fall 2 – Gesuchter Block bietet keinen Platz zum Einfügen • Falls ein benachbarter Block noch eine Einfügemöglichkeit besitzt, so füge Element in diesen ein bzw. tausche Elemente aus. (Minimierung #Blöcke) * • Neuer Block wird mit der Hälfte der Elemente des vollen Blocks erzeugt. Element wird nun in den richtigen Block eingefügt. * 3 I/Os Bx Bx+1 Bx+2 Bx+3 ges. max. 4 I/Os 1 2 5 7 9 13 15 17 19 Beispiel Blockgröße: B = 3 4 4 * ggf. Indexarray aktualisieren
„Bessere“ Implementierung – Operationen 3/3 Delete(x): Element mit Schlüssel ‚x‘ kann analog zur Search(x)-Operation gesucht werden. Element kann nun entfernt werden. * 1 I/O Fall – Block (Bx) hat nun < B/3 Elemente Prüfe ob ein Nachbarblock in der Summe mit Block Bx höchstens 2/3 Elemente besitzen. Wenn Block nicht eindeutig, wähle den Kleineren von Beiden und verschmelze die Blöcke. * 3 I/Os ges. max. 4 I/Os Beispiel Blockgröße: B = 6 |By| + |Bx| £ 2/3 B By Bx Bz 1 2 3 7 8 10 13 Bz > By * ggf. Indexarray aktualisieren
Implementierungsalternative Blockarray könnte durch eine einfach/doppelt verlinkte Liste ersetzt werden. Die daraus resultierenden Änderungen sind wie folgt: Die Suche innerhalb eines Block hat nun eine größere Laufzeit da keine binäre Suche möglich ist. ABER Das Aufrücken der Elemente bei Insert(x) und nach Delete(x) geschieht in O(1). Keine Änderung der I/O – Anzahl, aber Änderung der Laufzeit
Quellen U. Meyer, P. Sanders und J. Sibeyn (Eds.), Algorithms for Memory Hierarchies, Advances Lectures, Lecture Notes in Computer Science 2625, Springer 2003 • Kapitel 2: R. Pagh: Basic External Memory Data Structures