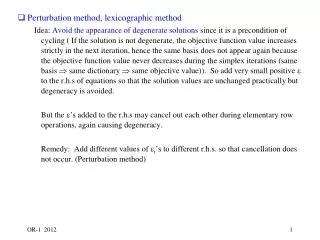
Annihilator Method
Annihilator Method. Jared Rosa Math 480 Spring 2013. Some Notations & Definitions. L(y) is the differential operator on y. E.g. y”’ - 3y” + 2y = x ; can be rewritten as L(y) = x. P c (r) is the characteristic polynomial of an ordinary differential equation.

Annihilator Method
E N D
Presentation Transcript
Annihilator Method Jared Rosa Math 480 Spring 2013
Some Notations & Definitions • L(y) is the differential operator on y. • E.g. y”’ - 3y” + 2y = x ; can be rewritten as L(y) = x. • Pc(r) is the characteristic polynomial of an ordinary differential equation. • E.g. Pc(r) = r3 – 3r2 + 2 , is the characteristic polynomial of the ode y”’ - 3y” + 2y.
So what is the Annihilator Method? • The Annihilator method is a faster method than the variation of constants used to solve non-homogenous differential equations with constant coefficients.
How does the method work? • The annihilator method uses a second differential operator denoted M, where the solution of the ode M(b) = O is the right hand side of the first differential operator L(y). Then using the Pc(r) of M(L(y)) we can determine the solutions of L(y). • E.G. • L(y) = b(x) & M(b) = O • So we have • M(L(y)) = M(b) = O • Hence, M annihilates L.
When Can I use this Method? • The annihilator method only has two simple requirement: • The differential operator that you want to annihilate has constant coefficients. E.g. L(y) = ay” + by’ + cy , where a, b, and c are constants • There exists a second differential operator M, such that if L(y) = f(x), then M(f) = O. Or said another way, the solution to the homogenous equation M(y) is f(x).
List of Annihilators Function Pc(r) of an annihilator • r – a • (r-a)k+1 • r2 + a2 • (r2 + a2)k+1 • eax • xkeax • sin(ax), cos(ax) (a real) • xksin(ax), xkcos(ax) (a real)
The Annihilator Vs. VOC Annihilator Method Variation Of Constants Method • L(y) = y”’ + y” + y’ + y = 1 • y(0) = 0, y’(o) = 1, y”(0) = 0 • First set L(y) = 0 to get Pc(r): • Pc(r) = r3+ r2 + r + 1 = (r2 + 1)(r + 1) • So, y1 = cos(x), y2 = sin(x), y3 = e-x • and yp = U1y1 + U2y2 + U3y3, where • U1 = ½(cos(x) – sin(x)) • U2 = ½(sin(x) + cos(x)) • U3 = ½e-x • So yg = 1 + c1sin(x) + c2cos(x) + c3e-x • And y = = 1 – ½ e-x + ½ sin(x) – ½ cos(x) • L(y) = y”’ + y” + y’ + y = 1 • y(0) = 0, y’(o) = 1, y”(0) = 0 • M(y) = y’ = 0 • M(L(y)) = y(4) + y”’ + y” + y’ = 0 • Pc(r) = r4 + r3 + r2 +r • 0 = r4 + r3 +r2 + r = r(r3 + r2 + r + 1) • 0 = r(r2 + 1)(r + 1) • yg = a + be-x + csin(x) + dcos(x) • We assume a=1 since a has to be a solution of L(y) to get:y = 1 – ½ e-x + ½ sin(x) – ½ cos(x)
Source • Coddington, Earl A. An introduction to ordinary differential equations. Dover Publications, inc. New York: 1961. pg 86 – 92.