Download
1 / 16
160 likes | 180 Vues
This Ph.D. thesis by Shui Hu presents a multipurpose planning framework for the strategy game of Go. It discusses the motivations, basic structures, and concepts of multipurpose moves and provides a concrete example. The thesis concludes that while the framework is a prototype and has limitations, it shows potential for improving computer Go programs.

E N D
Multipurpose Adversary Planning in the Game of Go Ph.D thesis by Shui Hu Presenter: Ling Zhao Date: November 18, 2002
Outline • Motivations • Overview • Basic structures and concepts • Combining goals • A concrete example • Conclusions
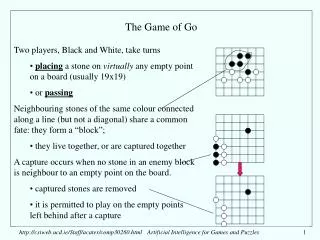
Motivations • Go is a strategy game • Computer Go programs still have difficulties to convey human’s knowledge • Multi-purpose moves are quite common in human-played Go games • Traditional multi-valued move is too passive!
Overview • Heuristic adversary planning • Static analysis and dynamic look ahead • Look for combined goals and the steps leading to them • Strength: actively search for combined goals • Weakness: only a prototype, hard to implement in a real system
Basic structures • Hierarchy of objects: group, chain, string, stone • Generate goals: • high level goals are generated by static analysis (using knowledge base) • low level goals are generated by looking ahead • Goal structure (see example next next page)
Goal relations • Goal and subgoals • Master and servant goal
Achievability Black to move, and the goal is to kill white group Achievable: Near-achievable:
Decide the achievability • Start from leaf goals • Generate goal/counter goal pairs • Use look ahead search • Propagate results upward • Note this method can also decide the achievability of combined goals
CP2 search procedure g11 : (g11, c11) (g11, c12) (g11,c21) … (g11, c33) g12 : (g12, c11) (g12, c12) (g12,c21) … (g12, c33) g33 : (g33, c12) (g33, c12) (g33,c21) … (g33, c33)
Interaction of leaf goals • If the intersection of moves to realize two near-achievable goals is not empty, we find some multipurpose moves! • Combine two goals and use the look ahead to decide if the multipurpose moves can make one of the near-achievable moves achievable. • If yes, your multipurpose planning works. • The example explains the situation similar to double threats, and there are more situations.
Conclusions • A multipurpose planning framework was brought out • Prototype, can only work on very few finely designed example • Planning is weak, and almost the same as search.