Download
1 / 1
10 likes | 124 Vues
200. 50. 180. 45. 160. 40. 140. 35. 120. 30. University of Southampton. 100. 25. 80. 20. % Particle Capture. Capture per image. 60. 15. 40. 10. 20. 5. 0. 0. 0.94. 0.96. 0.98. 1. 1.02. 1.04. 1.06. Slide depth (mm). Glass reflector. Glass reflector. Sensor

E N D
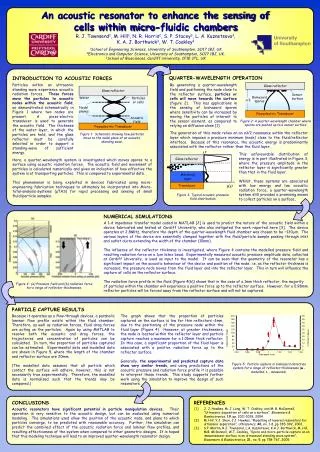
200 50 180 45 160 40 140 35 120 30 University of Southampton 100 25 80 20 % Particle Capture Capture per image 60 15 40 10 20 5 0 0 0.94 0.96 0.98 1 1.02 1.04 1.06 Slide depth (mm) Glass reflector Glass reflector Sensor surface Water Particles or cells Biohazard spores l/2 Nodal planes Piezoelectric Transducer Acoustic field Piezoelectric Transducer y Glass reflector Matching layer Transducer p(y) An acoustic resonator to enhance the sensing of cells within micro-fluidic chambers R. J. Townsend1, M. Hill1, N. R. Harris2, S. P. Stacey3, L. A. Kuznetsova3, K. A. J. Borthwick3, W. T. Coakley3 1School of Engineering Sciences, University of Southampton, SO17 1BJ, UK 2Electronics and Computer Science, University of Southampton, SO17 1BJ, UK. 3School of Biosciences, Cardiff University, CF10 3TL, UK QUARTER-WAVELENGTH OPERATION INTRODUCTION TO ACOUSTIC FORCES Particles within an ultrasonic standing wave experience acoustic radiation forces. These forces move the particles to acoustic nodes within the acoustic field, as demonstrated schematically in Figure 1 where two nodes are present. A piezo-electric transducer is used to generate the acoustic field. The thickness of the water layer, in which the particles are held, and the glass reflector must be carefully selected in order to support a standing-wave of sufficient energy. By generating a quarter-wavelength field and positioning the node close to the reflector surface, particles or cells will move towards the surface (figure 2). This has applications in the sensing of biohazard spores where sensitivity can be increased by moving the particles of interest to the sensor element, as compared to relying on diffusion alone [1]. Figure 2: A quarter-wavelength chamber where spores are pushed up to a sensor surface The generation of this mode relies on an nλ/2 resonance within the reflector layer which imposes a pressure minimum (node) close to the fluid/reflector interface. Because of this resonance, the acoustic energy is predominantly associated with the reflector rather than the fluid layer. Figure 1: Schematic showing how particles move to the nodal plane of an acoustic standing wave. This unfavourable distribution of energy is in part illustrated in Figure 3, where the pressure amplitude in the reflector layer is significantly greater than that in the fluid layer. Whilst, these systems are associated with low energy and low acoustic radiation force, a quarter-wavelength system still provides a promising means to collect particles on a surface, Here, a quarter-wavelength system is investigated which moves spores to a surface using acoustic radiation forces. The acoustic field and movement of particles is calculated numerically and gives an indication of how effective the system is at transporting particles. This is compared to experimental data. This phenomenon is being exploited in devices fabricated using micro-engineering fabrication techniques to ultimately be incorporated into Micro-total-analysis-systems (μTAS) for rapid processing and sensing of small fluid/particle samples. Figure 3: Typical acoustic pressure field distribution. NUMERICAL SIMULATIONS A 1-d impedance transfer model coded in MATLAB [2] is used to predict the nature of the acoustic field within a device fabricated and tested at Cardiff University, who also instigated the work reported here [3]. The device operates at 2.8MHz, therefore the depth of the quarter-wavelength fluid chamber was chosen to be ~130mm. The various layers of the device are essentially clamped together with the fluid/particle sample passing through inlet and outlet ducts extending the width of the chamber (10mm). The influence of the reflector thickness is investigated, where Figure 4 contains the modelled pressure field and resulting radiation force on a 1mm latex bead. Experimentally measured acoustic pressure amplitude data, collected at Cardiff University, is used as input to the model. It can be seen that the geometry of the resonator has a significant impact on the acoustic behaviour of the device and position of the node; i.e. as the reflector thickness is increased, the pressure node moves from the fluid layer and into the reflector layer.This in turn will influence the capture of cells on the reflector surface. The radiation force profile in the fluid (Figure 4(b)) shows that in the case of a 1mm thick reflector, the majority of particles within the chamber will experience a positive force up to the reflector surface. However, for a 0.98mm reflector particles will be forced away from the reflector surface and will not be captured. Figure 4: (a) Pressure field and (b) radiation force for a range of reflector thicknesses. PARTICLE CAPTURE RESULTS Because it operates as a flow-through devices, a parabolic laminar flow profile exists within the fluid chamber. Therefore, as well as radiation forces, fluid drag forces are acting on the particles. Again by using MATLAB to resolve both the acoustic and drag forces, the trajectories and concentration of particles can be calculated. In turn, the proportion of particles captured can be estimated. Experimental data and modelled data are shown in Figure 5, where the length of the chamber and reflector surface are 20mm. (The modelled data assumes that all particle which contact the surface will adhere, however, this is not necessarily true experimentally. Therefore, the modelled data is normalised such that the trends may be compared.) The graph shows that the proportion of particles captured on the surface is low for thin reflectors <1mm, due to the positioning of the pressure node within the fluid layer (Figure 4).However, at greater thicknesses, the node is located within the reflector layer and particle capture reaches a maximum for a 1.01mm thick reflector. In this case, a significant proportion of the fluid layer is associated with a positive radiation force up to the reflector surface. Generally, the experimental and predicted capture data show very similar trends, and using predictions of the acoustic pressure and radiation force profile it is possible to interpret these trends. This study supports further work using the simulation to improve the design of such resonators. Figure 5: Particle capture in biohazard detection systemfor a range of reflector thicknesses (■- modelled,♦ - measured). CONCLUSIONS Acoustic resonators have significant potential in particle manipulation devices. Their operation is very sensitive to the acoustic design, but can be evaluated using numerical modeling. The simulations used allow the position of the acoustic node, and plane to which particles converge, to be predicted with reasonable accuracy. Further, the simulation can predict the combined effect of the acoustic radiation force and laminar flow profiles, and resulting effectiveness of the system when compared to other geometric designs. It is hoped that this modeling technique will lead to an improved quarter-wavelength resonator design. REFERENCES [1] J. J. Hawkes, M. J. Long, W. T. Coakley, and M. B. McDonnell, “Ultrasonic deposition of cells on a surface”, Biosensors & Bioelectronics, 19, pp. 1021-1028, 2004. [2] M. Hill, Y.J. Shen, J.J. Hawkes, “Modelling of layered resonators for ultrasonic separation”, Ultrasonics, 40, no. 1-8, pp 385-392, 2002. [3] S.P. Martin, R.J. Townsend, L.A. Kuznetsova, K.A.J. Borthwick, M. Hill, M.B. McDonnell, W.T. Coakley, “Spore and micro-particle capture on an immunosensor surface in an ultrasound standing wave system”, Biosensors & Bioelectronics, 21, no. 5, pp 758-767, 2005