Download
1 / 40
450 likes | 1.03k Vues
Pohyb mechanismu. Dynamika I, 8. přednáška. Obsah přednášky :. úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,. Doba studia :. asi 1,5 hodiny. Cíl přednášky :. uvést studenty do problematiky mechanismů, seznámit studenty se základními typy vazeb

E N D
Pohyb mechanismu Dynamika I, 8. přednáška Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi 1,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit studenty se základními typy vazeb a se základními typy mechanismů.
Dynamika I, 8. přednáška Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu.
Dynamika I, 8. přednáška Mechanismy - úvod Základní pojmy. člen mechanismu - je jedno těleso, které nemění svůj tvar rám- je člen mechanismu pevně spojený se Zemí kinematická dvojice - je dvojice členů, spojených vazbou souřadnice vazby - je souřadnice, určující vzájemnou polohu členů dvojice vůči sobě navzájem hnací a hnaný člen - člen na straně pohonu a člen, jenž vykonává funkci, pro kterou byl mechanismus navržen vstupní a výstupní člen - člen na začátku a konci řetězce členů mechanismu počet stupňů volnosti - počet nezávislých pohybů které mechanismus může vykonávat souřadnice mechanismu - jedna nebo více nezávislých souřadnic, určujících polohu mechanismu kinematické schéma - v maximální možné míře zjednodušený náčrtek mechanismu
Dynamika I, 8. přednáška Mechanismy - úvod Kinematické schéma. v maximální možné míře zjednodušený náčrtek mechanismu, tak aby - byly zachovány ty rozměry, které jsou pro kinematiku podstatné, - byly potlačeny ty rozměry, které jsou pro kinematiku nepodstatné. Kinematické schéma může být od skutečného konstrukčního provedení mechanismu značně odlišné.
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách rovinný mechanismus prostorový mechanismus
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách rovinný mechanismus prostorový mechanismus
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách podle počtu stupňů volnosti Okamžitá poloha mechanismu je jednoznačně určena tolika nezávislými souřadnicemi, kolik stupňů volnosti mechanismus má. Mechanismus má tolik stupňů volnosti, kolik nezávislých souřadnic je zapotřebí k jednoznačnému určení jeho okamžité polohy. souřadnice mechanismu - jedna nebo více nezávislých souřadnic, určujících polohu mechanismu; souřadnic mechanismu je právě tolik, kolik stupňů volnosti mechanismus má
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách podle počtu stupňů volnosti mechanismy s 1 stupněm volnosti
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách projíždí-li auto zatáčkou - otáčí se obě kola hnané nápravy různou rychlostí podle počtu stupňů volnosti mechanismy s 1 stupněm volnosti mechanismy se 2 stupni volnosti - diferenciály f a y - dvě souřadnice mechanismu
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách podle počtu stupňů volnosti mechanismy s 1 stupněm volnosti mechanismy se 2 stupni volnosti - diferenciály mechanismy s více stupni volnosti počet stupňů volnosti mechanismu není nijak omezen mechanismus se sedmi stupni volnosti
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách podle počtu stupňů volnosti mechanismy s 1 stupněm volnosti mechanismy se 2 stupni volnosti - diferenciály mechanismy s více stupni volnosti podle charakteru převodu mechanismy s konstantním převodem mechanismy s proměnným převodem
Dynamika I, 8. přednáška Mechanismy - úvod Třídění mechanismů. mechanismy rovinné všechny členy konají rovinný pohyb v navzájem rovnoběžných rovinách mechanismy prostorové alespoň jeden člen koná prostorový pohyb nebo členy konají rovinné pohyby v různoběžných rovinách podle počtu stupňů volnosti mechanismy s 1 stupněm volnosti mechanismy se 2 stupni volnosti - diferenciály mechanismy s více stupni volnosti podle charakteru převodu mechanismy s konstantním převodem mechanismy s proměnným převodem podle počtu členů dvoučlenné mechanismy trojčlenné mechanismy čtyřčlenné mechanismy vícečlenné mechanismy
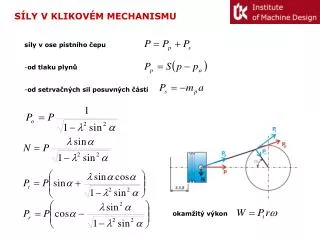
Dynamika I, 8. přednáška Mechanismy - úvod Počet stupňů volnosti mechanismu. Počet stupňů volnosti mechanismu stanovíme intuitivně nebo výpočtem. Mechanismus má tolik stupňů volnosti, kolik nezávislých souřadnic je zapotřebí k jednoznačnému určení jeho okamžité polohy. Jedna nezávislá a dvě závislé souřadnice klikového mechanismu. Jeden stupeň volnosti. Výpočtem ze vzorce. i - počet stupňů volnosti, n - počet členů (včetně rámu), p1 - počet vazeb první třídy (odebírají 1 stupeň volnosti), p2 -počet vazeb druhé třídy (odebírají 2 stupně volnosti). Pro prostorový mechanismus. pj -počet vazeb j-té třídy (odebírají j stupňů volnosti).
Dynamika I, 8. přednáška Vazby Vazby se dělí na rovinné a prostorové. Rovinná vazba - spojuje dva členy mechanismu, konající rovinný pohyb v navzájem rovnoběžných rovinách. Prostorová vazba - spojuje dva členy mechanismu, z nichž alespoň jeden koná prostorový pohyb, nebo konající rovinný pohyb v různoběžných rovinách. Rozlišujeme též idealizované a reálné vazby. Idealizovaná vazba - zanedbáváme pasivní odpory(tření). Reálná vazba - bereme v úvahu pasivní odpory (tření). U každé vazby sledujeme její vlastnosti z hlediska statiky ... Jaké síly nebo momenty vazba přenáší a jaké síly nebo momenty nepřenáší ? ... a její vlastnosti z hlediska kinematiky. Jaké vzájemné pohyby obou těles vazba umožňuje a jaké vzájemné pohyby neumožňuje ? Vazba je j-té třídy jestliže znemožňuje j vzájemných pohybů (odebírá j stupňů volnosti).
Dynamika I, 8. přednáška Vazby rovinné vazby idealizované vazba 3. třídy dokonalé vetknutí
Dynamika I, 8. přednáška Vazby rovinné vazby idealizované vazba 3. třídy dokonalé vetknutí vazby 2. třídy kloubová vazba (rotační) neumožňuje posuv umožňuje rotaci
Dynamika I, 8. přednáška Vazby rovinné vazby idealizované vazba 3. třídy dokonalé vetknutí vazby 2. třídy kloubová vazba (rotační) posuvná vazba přenáší sílu a moment znemožňuje posuv a rotaci nepřenáší sílu umožňuje posuv
Dynamika I, 8. přednáška Vazby rovinné vazby idealizované vazba 3. třídy dokonalé vetknutí vazby 2. třídy kloubová vazba (rotační) posuvná vazba valivá vazba (bez prokluzu v bodě dotyku) valení bez prokluzu umožňuje posuv a rotaci, avšak tyto pohyby nejsou nezávislé valivá vazba je z hlediska přenosu sil rovnocenná kloubové vazbě
z Dynamika I, 8. přednáška Vazby rovinné vazby idealizované vazba 3. třídy dokonalé vetknutí vazby 2. třídy kloubová vazba (rotační) posuvná vazba valivá vazba (bez prokluzu v bodě dotyku) vazby 1. třídy posuvný kloub umožňuje posuv a rotaci neumožňuje posuv
Dynamika I, 8. přednáška Vazby rovinné vazby idealizované vazba 3. třídy dokonalé vetknutí vazby 2. třídy kloubová vazba (rotační) posuvná vazba valivá vazba (bez prokluzu v bodě dotyku) vazby 1. třídy posuvný kloub obecná vazba (s prokluzem v bodě dotyku) umožňuje nezávislý posuv a rotaci z prokluz v bodě dotyku neumožňuje posuv
Dynamika I, 8. přednáška Vazby rovinné vazby idealizované vazba 3. třídy dokonalé vetknutí vazby 2. třídy kloubová vazba (rotační) posuvná vazba valivá vazba (bez prokluzu v bodě dotyku) vazby 1. třídy posuvný kloub obecná vazba (s prokluzem v bodě dotyku) Každá vazba přenáší takové síly (momenty), jakým vzájemným pohybům zabraňuje. zabraňuje-li vazba posunutí - přenáší sílu zabraňuje-li vazba natočení - přenáší moment neplatí zcela pro reálné vazby
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované U prostorových vazeb nebude proveden úplný výčet, budou jen uvedeny příklady vazeb. Různých prostorových vazeb, z nichž každá některé z 6 pohybů umožňuje, jiné znemožňuje, je příliš mnoho.
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, nepřenáší moment k ose rotace
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, nepřenáší sílu ve směru posuvu
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, šroubová vazba umožňuje posuv a rotaci, avšak tyto pohyby nejsou nezávislé s - stoupání závitu - posunutí při jedné otáčce (360º 6,28 rad)
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, šroubová vazba vazby 4. třídy posuvná rotační vazba
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, šroubová vazba vazby 4. třídy posuvná rotační vazba dvojitý kloub
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, šroubová vazba vazby 4. třídy posuvná rotační vazba dvojitý kloub vazby 3. třídy sférický kloub
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, šroubová vazba vazby 4. třídy posuvná rotační vazba dvojitý kloub vazby 3. třídy sférický kloub vazby 2. třídy posuvný sférický kloub
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, šroubová vazba vazby 4. třídy posuvná rotační vazba dvojitý kloub vazby 3. třídy sférický kloub vazby 2. třídy posuvný sférický kloub vazby 1. třídy obecná kinematická dvojice
Dynamika I, 8. přednáška Vazby prostorové vazby idealizované přenáší 3 síly a 3 momenty vazba 6. třídy dokonalé vetknutí vazby 5. třídy kloubová vazba (rotační) přenáší 3 síly a 2 momenty, posuvná vazba přenáší 2 síly a 3 momenty, šroubová vazba vazby 4. třídy posuvná rotační vazba dvojitý kloub vazby 3. třídy sférický kloub vazby 2. třídy posuvný sférický kloub vazby 1. třídy obecná kinematická dvojice Každá vazba přenáší takové síly (momenty), jakým vzájemným pohybům zabraňuje. zabraňuje-li vazba posunutí - přenáší sílu zabraňuje-li vazba natočení - přenáší moment neplatí zcela pro reálné vazby
2 Dynamika I, 8. přednáška Typy mechanismů trojčlenné mechanismy vačkové mechanismy Vačkový mechanismus s plochým zvedátkem 1 3 Palcový mechanismus se zvedátkem
Dynamika I, 8. přednáška Typy mechanismů trojčlenné mechanismy mechanismy s obecnou kinematickou dvojicí Obecná kinematická dvojice
Dynamika I, 8. přednáška Typy mechanismů čtyřčlenné mechanismy klikový mechanismus
Dynamika I, 8. přednáška Typy mechanismů čtyřčlenné mechanismy čtyřkloubový mechanismus
Dynamika I, 8. přednáška Typy mechanismů čtyřčlenné mechanismy kulisový mechanismus
Dynamika I, 8. přednáška Typy mechanismů čtyřčlenné mechanismy Oldhamova spojka Slouží k přenosu rotačního pohybu beze změny (1:1) při jisté (ne příliš velké) nesouososti hnacího a hnaného členu.
Dynamika I, 8. přednáška Typy mechanismů vícečlenné rovinné mechanismy
Dynamika I, 8. přednáška Typy mechanismů prostorové mechanismy