Registration and Alignment
Registration and Alignment. Speaker: Liuyu 07.12.10. The goal. Form a 3D model of an object: Data acquisition Registration between views Integration of views. ICP algorithm. References. A Method for Registration of 3-D Shapes Paul J. Besl, Member, IEEE, and Neil D. McKay


Registration and Alignment
E N D
Presentation Transcript
Registration and Alignment Speaker: Liuyu 07.12.10
The goal • Form a 3D model of an object: • Data acquisition • Registration between views • Integration of views ICP algorithm
References • A Method for Registration of 3-D Shapes • Paul J. Besl, Member, IEEE, and Neil D. McKay • IEEE Transaction on Pattern Analysis and Machine Intelligence,1992
Mathematic Preliminaries • Let t be the triangle defined by the three points • The distance between and t : • Let T = {ti} for i =1,…,Nt,, then the distance between and T:
References • Object Modeling by Registration of Multiply Range Images • Yang Chen and Gerard Medioni • Robotics and Automation, 1991, Proceedings • In Image and Visual Computer , 1992
Mathematic Preliminaries • Point to Parametric Entity Distance • the parametric entity • let ,use the Newton`s iteration method: • Point to Implicit Entity Distance • Minimize the condition: • Update formula:
Mathematic Preliminaries • Corresponding Point Set Registration • Let P = { pi } be a measured data, X be a model shape, C be the closest point operator: Y = C(P,X), where Y denote the resulting set of closest points.
Mathematic Preliminaries • Corresponding Point Set Registration • The least squares registration (q, d) = φ(P,Y), where q is the registration state vector, and d is the mean square point matching error.
Getq • The formulas to get q: • where is a unit rotation quaternion to generate the rotation matrix and is a translation vector. • Minimize the mean square objective function to getq : is 3*3 rotation matrix generated by
Get q • corresponding to the maximum eigenvalue of the matrix : where is the cross-covariance matrix of P and X, • The translation vector
Get d • The mean square point matching error
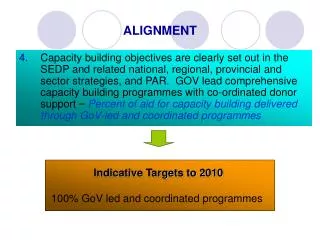
ICP Algorithm Statement • Input: the point set P = { pi } fromthe data shape and the model shape X( with Nx supporting geometric primitives) , a tolerance т • Initialization of the iteration : P0= P, and k=0; • then start the iteration: • Computer the closest points : Yk = C( Pk, X )(cost:o( Np*logNx) ) • Compute the registration : (qk,, dk) = φ ( Pk , Yk )(cost O( Np ) • Apply the registration : Pk+1 = qk( P0 ) (cost: O( Np ) ) • Terminate the iteration when dk – dk+1 < т.
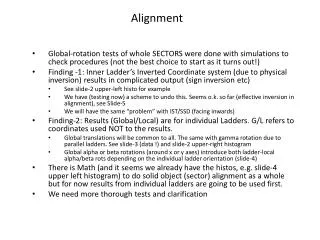
An Accelerated ICP Algorith • For q is theangular tolerance • For d : a linear approximation and a parabolic interpolant to the last three datas d1(v) = a1*v+b1; d2(v) = a2*v^2 + b2 *v + c2;
Resuts • curve
Results • triangular
Results • triangular