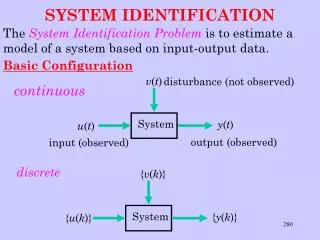
Piecewise Gaussian Process for System Identification
Piecewise Gaussian Process for System Identification. Juan Yan Prof Kang Li and Prof Erwei Bai Queen’s University Belfast. Outline. Introduction Gaussian Process(GP) Regression Piecewise GP method Results Conclusion. Introduction. Gaussian Process.

Piecewise Gaussian Process for System Identification
E N D
Presentation Transcript
Piecewise Gaussian Process for System Identification Juan Yan Prof Kang Li and Prof Erwei Bai Queen’s University Belfast UKACC PhD Presentation Showcase
Outline • Introduction • Gaussian Process(GP) Regression • Piecewise GP method • Results • Conclusion UKACC PhD Presentation Showcase
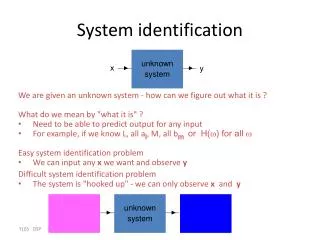
Introduction • Gaussian Process • Gaussian Process is a global black-box non-parametric modelling method based on Bayesian inference. It uses the empirical data on the absence of the specific system model structure to estimate the most probable output and the chance of it. • Piecewise regression • When a system displays different characteristics in different intervals, it becomes necessary to model the system with varied parameters, structure, or even method. Splines are widely applied. UKACC PhD Presentation Showcase
Gaussian Process regression • A Gaussian distribution is fully specified by a mean vector, , and covariance matrix . • A Gaussian process is a generalization of a multivariate Gaussian distribution to infinitely many variables, which is fully specified by a mean function m(x) and covariance function k(x, x’). UKACC PhD Presentation Showcase
Gaussian Process regression • GP regression results for different systems UKACC PhD Presentation Showcase
Piecewise GP • In reality, it is not reasonable to expect a single Gaussian Process would cover a large interval, it makes sense to model an unknown f(x) by a number of Gaussian models. Constraints: UKACC PhD Presentation Showcase
Results: Piecewise GP compared with General GP noise ~ N (0, 0.2 ) The system is continuous on the whole interval and there are 20, 5, 10 data samples on the 3 segments respectively. UKACC PhD Presentation Showcase
Results: Piecewise GP compared with Cubic splines noise ~ N (0,10) 48 data points in all UKACC PhD Presentation Showcase
Conclusions • Piecewise GP shows better properties: • Compared with general GP, it suites better for large interval regression, and saves computational complexity; • Compared with Cubic splines, it fits better for high order system with noise. • Future work • Comparison needs to be implemented between GP and other piecewise methods (like piecewise polynomial); • Identification of multidimensional systems will be carried out with piecewise GP; • Adaptive methods will be studied for interval partition and non-uniform points sampling during the implementation of piecewise GP. UKACC PhD Presentation Showcase
Thank you for your attention UKACC PhD Presentation Showcase