Context Sensing
Context Sensing. 金仲達教授 清華大學資訊系統與應用研究所 九十三學年度第一學期. Outline. Location sensing RFID. Location Sensing. “Location Systems for Ubiquitous Computing,” Jeffrey Hightower, Gaetano Borriello, University of Washington, IEEE Computer Magazine , August 2001

Context Sensing
E N D
Presentation Transcript
Context Sensing 金仲達教授 清華大學資訊系統與應用研究所 九十三學年度第一學期
Outline • Location sensing • RFID
Location Sensing “Location Systems for Ubiquitous Computing,” Jeffrey Hightower, Gaetano Borriello, University of Washington, IEEE Computer Magazine, August 2001 • Systems and technologies that automatically locate people, equipment, and other tangibles. • Develop a taxonomy to help developers of location-aware applications better evaluate their options when choosing a location-sensing system
Outline: Location Sensing • Introduction • Location Systems • Techniques • Properties • Survey of Location Systems • Research Directions • Summary
Techniques • Triangulation • Use the geometric properties of triangles to compute object locations. • Proximity • Measure nearness to a known set of points. • The object’s presence is sensed using a physical phenomenon with limited range. • Scene Analysis • Use features of a scene observed from a particular vantage point to draw conclusions about the location of the observer or of objects in the scene.
Techniques – Triangulation • Lateration: Compute the position of an object by measuring its distance from multiple reference positions • Direct • Physical action or movement. • Time-of-Flight • Measure the time it takes to travel between the object and point P at a known velocity. • Attenuation • Given a function correlating attenuation and distance for a type of emission and the original strength of the emission
Techniques – Angulation • Use primarily angle or bearing measurements • 2D angulation requires two angle measurements and one length measurement such as the distance between the reference points.
Techniques – Scene Analysis • Static • Observed features are looked up in a predefined dataset that maps them to object locations. • Differential • Tracks the difference between successive scenes to estimate location.
Techniques – Scene Analysis • Advantages • The location of objects can be inferred using passive observation and features that do not correspond to geometric angles or distances. • Disadvantages • The observer needs to have access to the features of the environment against which it will compare its observed scenes.
Techniques – Proximity • Detecting physical contact • Detect physical contact with an object • Include pressure sensors, touch sensors,… • Monitoring wireless cellular access points • Monitoring when a mobile object device is in range of one or more access points in a wireless cellular network • Observing automatic ID systems • If the device scanning the label, interrogating the tag, or monitoring the transaction has a know location, the location of the mobile object can be inferred.
Outline: Location Sensing • Introduction • Location Systems • Techniques • Properties • Survey of Location Systems • Research Directions • Summary
Properties • Physical position and Symbolic position • Absolute versus Relative • Localized location computation • Accuracy and Precision • Scale • Recognition • Cost • Limitations
Properties – Physical and Symbolic Positions • Physical • A building situated at 47°39’17”N by 122°18’23”W, at a 20.5-meter elevation • E.g., GPS • Symbolic • Encompass abstract ideas of where something is • E.g., in the kitchen, near to a mailbox, a train approach Denver, …
Properties – Physical and Symbolic Positions • Physical position: • Can be augmented to provide symbolic location with additional information, infrastructure, or both, e.g., linking train positions to reservation and ticketing database can help locate a passenger on a train • Can determine a range of symbolic information, e.g., use a GPS to find the closest printer, or link GPS with calendar to provide current activity of a person • Purely symbolic location systems typically provide coarse-grained physical positions • Increase accuracy may need multiple readings or sensors
Properties – Absolute versus Relative • Absolute • Use a shared reference grid of all located objects • All GPS receivers use latitude, longitude, and altitude; Two GPS receivers placed at the same position will report same position readings, and refers to the same place regardless of GPS receiver • Relative • Each object can have its own frame of reference • For example, a mountain rescue team searching for avalanche victims can use handheld computers to locate victims’ avalanche transceivers. Each rescuer’s device reports the victims’ position relative to itself.
Properties – Absolute versus Relative • An absolute location can be transformed into a relative location • Relative to a second reference point, but may not always available • In reverse, we can use triangulation to determine an absolute position from multiple relative reference points.
Properties – Localized Location Computation • Ensures privacy by mandating that no other entity may know where the located object is unless it specifically publicizes that information • Some systems require the located object to periodically broadcast, respond with, or otherwise emit telemetry to allow the external infrastructure to located it • Infrastructure can find objects in its purview without directly involving the objects in the computation • Reduce computational and power demands on the objects being located => lower costs and smaller form factors
Properties – Accuracy and Precision • Some GPS receiver can locate position to within 10 m for 95% of measurements • The distances denote the accuracy, or grain size, of the position information GPS can provide • The percentages denote precision, or how often we can expect to get that accuracy • Sensor Fusion seeks to improve accuracy and precision by integrating many location or position systems to form hierarchical and overlapping levels of resolution, e.g., Robot
Properties – Scale • Scale: locating objects worldwide, within a metropolitan area, throughout a campus, in a particular building, or within a single room • Assessing: coverage area per unit of infrastructure and # objects the system can locate per unit of infrastructure per time interval • Systems can often expand to a larger scale by increasing the infrastructure, e.g., a tag system that locates objects in a single building can operate on a campus by outfitting all campus buildings and outdoor areas with the necessary sensor infrastructure
Properties – Scale • Hindrances to scalability in a location system include not only the infrastructure cost but also middleware complexity
Properties – Recognition • For applications that need to recognize or classify located objects to take a specific action based on their location, an automatic identification mechanism is needed. • For example, a modern airport baggage handling system needs to automatically route outbound and inbound luggage to the correct flight or claim carousel • Systems with recognition capability may recognize only some feature types • For example, cameras and vision systems can easily distinguish the color or shape of an object but cannot automatically recognize individual people
Properties – Recognition • A general technique for providing recognition capability assigns names or globally unique IDs (GUID) to objects the system locates • It can also combine the GUID with other contextual information so it can interpret the same object differently under varying circumstances. • For example, a person can retrieve the descriptions of objects in a museum in a specified language.
Properties – Cost • Time Cost • Installation process’s length and the system’s administration needs • Space Cost • Amount of installed infrastructure and the hardware’s size and form factor • Capital Cost • Price per mobile unit or infrastructure element and the salaries of support personnel • GPS receivers need an antenna of sufficient size for adequate satellite reception and may need a second antenna to receive the land-based differential signal.
Properties – Limitations • Some system will not function in certain environments • GPS: receivers usually cannot detect satellites’ transmissions indoors • Possible solution: uses a system of GPS repeaters mounted at the edges of buildings to rebroadcast the signals inside • In general, we assess functional limitations by considering the characteristics of the underlying technologies that implement the location system.
Outline: Location Sensing • Introduction • Location Systems • Techniques • Properties • Survey of Location Systems • Research Directions • Summary
Survey of Location Systems • Global Positioning System (GPS) • Active Badge • Developed at Olivetti Research Lab., now AT&T Cambridge • Active Bat • Developed by AT&T • MotionStar magnetic tracker • Developed by Ascension • SpotON • Developed by Washington
Global Positioning System (GPS) • GPS satellites (24+3): • Have no knowledge about who uses the signals they transmit • Are precisely synchronized with each other and transmit their local time in the signal allowing receivers to compute the difference in time-of-flight • Receivers: • Allow receivers to compute their location to within 1 to 5 meters • Receivers can compute 3-D position using 4 satellites
Active Badge • A cellular proximity system using diffuse infrared • Usage: • Person wears a small infrared badge • Badge emits a unique id every 10 sec or on demand • Central server collects data from fixed infrared sensors around the building, aggregates it, and provides an API for using the data • Provide absolute location information • Location is symbolic, representing, for example, the room in which the badge is located
Active Badge Four generations of the Active Badge Network sensor (contains two 87C751 microprocessor
Active Badge: Limitations • As with any diffuse infrared system, Active Badges have difficulty in locations with fluorescent lighting or direct sunlight because of the spurious infrared emissions that these light sources generate • Diffuse infrared has an effective range of several meters, which limits cell sizes to small- or medium-sized rooms
Active Bat • Uses ultrasound time-of-flight lateration • Provide more accurate positioning than Active Badge • Usage: • Users and objects carry Active Bat tags • Each Bat has a GUID for addressing and recognition • In response to a request the controller sends via short-range radio, a Bat emits an ultrasonic pulse to a grid of ceiling-mounted receivers • Each ceiling sensor measures time interval from reset to ultrasonic pulse arrival and computes the distance • Local controller then forwards the distance measurements to a central controller
Active Bat Bat (7.5cm*3.5cm*1.5cm) Power: 3.6 V Lifetime: around 15 months Unique 48-bit code Bi-directional 433MHz radio Two buttons, two LEDs, a speaker, and a voltage monitor Placed in a square grid, 1.2m apart Connected by a high-speed serial network The serial network is terminated by a DSP calculation board
Active Bat: Limitations • The system can locate Bats to within 9 cm of their true position for 95 percent of the measurements, and work to improve the accuracy even further is in progress • Require a large fixed-sensor infrastructure throughout the ceiling • Rather sensitive to the precise placement of these sensors. • Disadvantages: scalability, ease of deployment, and cost
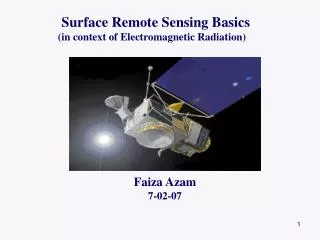
MotionStar Magnetic Tracker • Use scene analysis, lateration and electronmagnetic sensing • Tracking systems uses DC magnetic sensors to overcome blocking and post processing delays . • System computes the position and orientation of the receiving antennas by measuring the response in three orthogonal axes to the transmitted field pulse, combined with the constant effect of the earth’s magnetic field
MotionStar Magnetic Tracker MotionStar Wireless (Magnetic pulse transmitting antennas receiving antennas and Controller) MotionStar Controller
MotionStar Magnetic Tracker • Sense precise physical positions relative to the magnetic transmitting antenna • Advantages • Very high precision and accuracy • Disadvantages • Steep implementation costs and the need to tether the tracked object to a control unit
SpotON • Implement ad hoc lateration with low-cost tags • Ad-hoc location sensing is a fusion of concepts from object location tracking and the theories of ad-hoc networking • SpotON tags use radio signal strength information (RSSI) as a distance estimator to perform ad-hoc lateration.
Outline: Location Sensing • Introduction • Location Systems • Techniques • Properties • Survey of Location Systems • Research Directions • Summary
Sensor Fusion • The use of multiple technologies or location systems simultaneously to form hierarchical and overlapping levels of sensing • Provide aggregate properties unavailable when using location systems individually • For example, integrating several systems with different error distributions may increase accuracy and precision beyond what is possible using an individual system
Ad hoc Location Sensing • Locating objects without drawing on the infrastructure or central control • In a purely ad hoc location-sensing system, all of the entities become mobile objects with the same sensors and capabilities • To estimate their locations, objects cooperate with other nearby objects by sharing sensor data to factor out overall measurement error • Cluster-based approach: Objects in the cluster are located relative to one another or absolutely if some objects in the cluster occupy known locations
Location Sensing System Accuracy • Comparing the accuracy and precision of different location sensing systems • Need quantitative evaluations • Should include error distribution, summary of accuracy and precision and any relevant dependencies, e.g. density of infrastructural elements • Accurately described error distribution can be used as partial input for simulating a system=> use of simulation for evaluation
Outline: Location Sensing • Introduction • Location Systems • Techniques • Properties • Survey of Location Systems • Research Directions • Summary
Location Sensing: Summary • Location sensing is a mature enough field to define a space within a taxonomy that is generally populated by existing systems • Future work should generally focus on • Lowering cost • Reducing the amount of infrastructure • Improving scalability • Creating systems that are more flexible within the taxonomy
Outline • Location sensing • RFID
Outline: RFID • System Components • Transponders/Tags • Reader/Interrogator • RF Transponder Programmers • RFID System Categories • Areas of Application for RFID
What is RFID? • Radio Frequency Identification • Basic components: • An antenna or coil • A transceiver (with decoder) or reader • A transponder (RF Tag), electronically programmed with unique information • Data are carried intransponders to provideidentification