Download
1 / 1
10 likes | 145 Vues
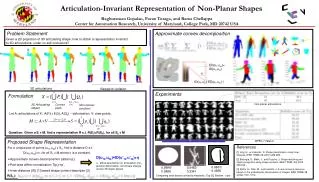
3D articulations. Viewpoint variation. Articulation-Invariant Representation of Non-Planar Shapes. Raghuraman Gopalan, Pavan Turaga, and Rama Chellappa Center for Automation Research, University of Maryland, College Park, MD 20742 USA. Problem Statement. Approximate convex decomposition.

E N D
3D articulations Viewpoint variation Articulation-Invariant Representation of Non-Planar Shapes Raghuraman Gopalan, Pavan Turaga, and Rama Chellappa Center for Automation Research, University of Maryland, College Park, MD 20742 USA Problem Statement Approximate convex decomposition Given a 2D projection of 3D articulating shape, how to obtain a representation invariant to 3D articulations, under no self-occlusions? ED(u1,um)=ID(u1,um) ID(u1,um)-ED(u1,um) ↑ Experiments Formulation Non-planar articulations 3D Articulating Object Convex parts Non-convex junctions Let A: articulations of X; A(Pi)ϵ E(3), A(Qij) ~ deformation, V: view-points. Question: Given a Siϵ M, find a representation R s.t. R(Si)=R(Sk), for all Skϵ M Proposed Shape Representation MPEG-7 dataset References [1] Ling, H., and Jacobs, D. Shape classification using inner distance, IEEE TPAMI 29 (2007) 286-299. [2] Belongie, S., Malik, J., and Puzicha, J. Shape matching and object recognition using shape contexts, IEEE TPAMI (24) 2002 509-522. [3] Rahtu, E., Salo, M., and Heikkila, J. A new convexity measure based on the probabolistic interpretation of images. IEEE TPAMI 28 (2006) 1501-1512. • For a unique pair of points (u1k,u2k) ϵ Sk, find a distance D s.t. • Approximate convex decomposition (obtain pi) • Part-wise affine normalization T(pi)->p’i • Inner-distance (ID) [1] based shape context descriptor [2] D(u1k,u2k)=c, for all Skϵ M where c is a constant. D(u1k,u2k)=ID(u’1k,u’2k)+η η- affine assumption on articulation of pi, junction deformation, and shape change across 3D object planes 0.9801/ 0.4655 0.5483/ 0.3341 0.9999/ 0.9998 R(Sk): Comparing area-based convexity measures: Top [3], Bottom - ours