Modeling lattice modular systems with space groups
Modeling lattice modular systems with space groups. Nicolas Brener , Faiz Ben Amar, Philippe Bidaud Laboratoire de Robotique de Paris Université de Paris 6. Lattice Robot vs Crystal. Lattice Robot Connectors have discrete positions in a lattice

Modeling lattice modular systems with space groups
E N D
Presentation Transcript
Modeling lattice modular systems with space groups Nicolas Brener, Faiz Ben Amar, Philippe Bidaud Laboratoire de Robotique de Paris Université de Paris 6
Lattice Robot vs Crystal • Lattice Robot • Connectors have discrete positions in a lattice • Mobilities act on the position of the connectors • Mobility are discrete motions • Crystal • Atoms have discrete positions in a lattice • Symmetries act on the atoms positions • Symmetries are discrete isometries • Use of crystallographic knowledge • Discrete Motion Chiral space groups • Connectors position Wyckoff sets
Discrete motion spaces Point groups Lattice groups Space groups Wyckoff positions Group hierarchy Classification of lattice robots Design of lattice robots Next steps Outline
Transformation Groups taxonomy Isometry (length preserved) Motion (length and orientation preserved) Continuous 3D Isometry group SE3 SO3 Translations group Subgroup point groups 230 Crystallographic Space groups types Discrete rotation groups Subset 65 Chiral Space Groups types (Sohncke Groups) Discrete 32 Crystallographic point groups 11 Crystallographic rotation groups 14 Lattice groups types
Discrete motion spaces • Discrete rotation chiral point group • Discrete translation lattice group • Discrete motion chiral space group
Discrete motion spaces • 11 chiral point groups (rotation groups) • Finite sets • Point group 622 • 12 rotations • 1 6-fold axes • 6 2-fold axes • Generator: { 180° rotation along x, 60° rotation along z } Geometric elements 6-fold rotation 2-fold rotation
Point group 432 24 rotations 3 4-fold axes 4 3-fold axes 6 2-fold axes Generator: { 90° rotation along x, 90° rotation along y } 4-fold rotation 3-fold rotation 2-fold rotation Discrete motion spaces Geometric elements
Lattice groups Infinite sets Generators: 3 translations 14 types Cubic lattice {(a,0,0),(0,a,0),(0,0,a)} Cubic centered lattice {(-a,a,a), (a,-a,a), (a,a,-a)} Cubic face centered lattice {(a,a,0),(a,0,a), (0,a,a)} Hexagonal lattice {(a,0,0),(a/2, a√3/2, h)} Triclinic lattice {A,B,C} Discrete motion spaces
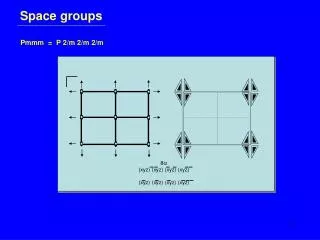
Discrete motion spaces • Chiral Space Group • Infinite sets • Have rotations and translations (and screw) • 65 types • Described in the « International Tables for Crystallography » edition th. Hahn
Discrete motion spaces Geometric elements of P622, except screw axes 6-fold 3-fold 2-fold
Discret motion spaces Geometric elements of P432, except screw axes 4-fold 3-fold 2-fold
Discret motion spaces Geometric elements of F432, except screw axes 4-fold 3-fold 2-fold
Orthogonal rotation symmetry identity 3-fold 4-fold 2-fold 6-fold Tangential rotation symmetry identity 2-fold Wyckoff positions and Connectors
P432 Maximum chiral space groups P622 F432 I432 60 other chiral space groups Minimum chiral space group P1 Space Group Hierarchy • Classification • Minimum space group • Design in Maximum groups
Classification • M-tran • Mobilities match 4-fold axes of F432 • Connectors match Wyckoff position e • The connectors have 4-fold symmetry
Designing Choose a space, and corresponding wyckoff position(s) and orientation(s). A module is constructed by selecting some mobilities and connectors and gluing them together Example: in F432 with 1 position in (a)
Designing Choose a space, and corresponding wyckoff position(s) and orientation(s). A module is constructed by selecting some mobilities and connectors and gluing them together Example: in F432 with 1 position in (a)
Designing Choose a space, and corresponding wyckoff position(s) and orientation(s). A module is constructed by selecting some mobilities and connectors and gluing them together Example: in F432 with 1 position in (a)
Designing Choose a space, and corresponding wyckoff position(s) and orientation(s). A module is constructed by selecting some mobilities and connectors and gluing them together Example: in F432 with 1 position in (a)
Designing Choose a space, and corresponding wyckoff position(s) and orientation(s). A module is constructed by selecting some mobilities and connectors and gluing them together Example: in F432 with 1 position in (a) 4-fold 2-fold 3-fold Rotation axis Node Connexion plate
Chiral Space groups give: All possible mobility All possible orientation, position and symmetries for connectors Lattice design but chain type product (ex: M-tran) Provides a framework to design several compatible systems, or extend existing systems with new modules. But: it does not provide automatically an operational modular system… Collision Joint stops … Conclusion
Further steps • Formalize and automate classification. • Find rules on connector positions and mobilities that provide systems that efficiently reconfigure. • Develop a design interface.